Kobuki Turtlebot II. User’s Manual
3. Assembly instructions
In this section will be described how to assembly the robot and some other useful
information. This guide is based on the information available on the official site
http://kobuki.yujinrobot.com.
3.1 Assembling the robot
Please refer to the provided assembly guide.
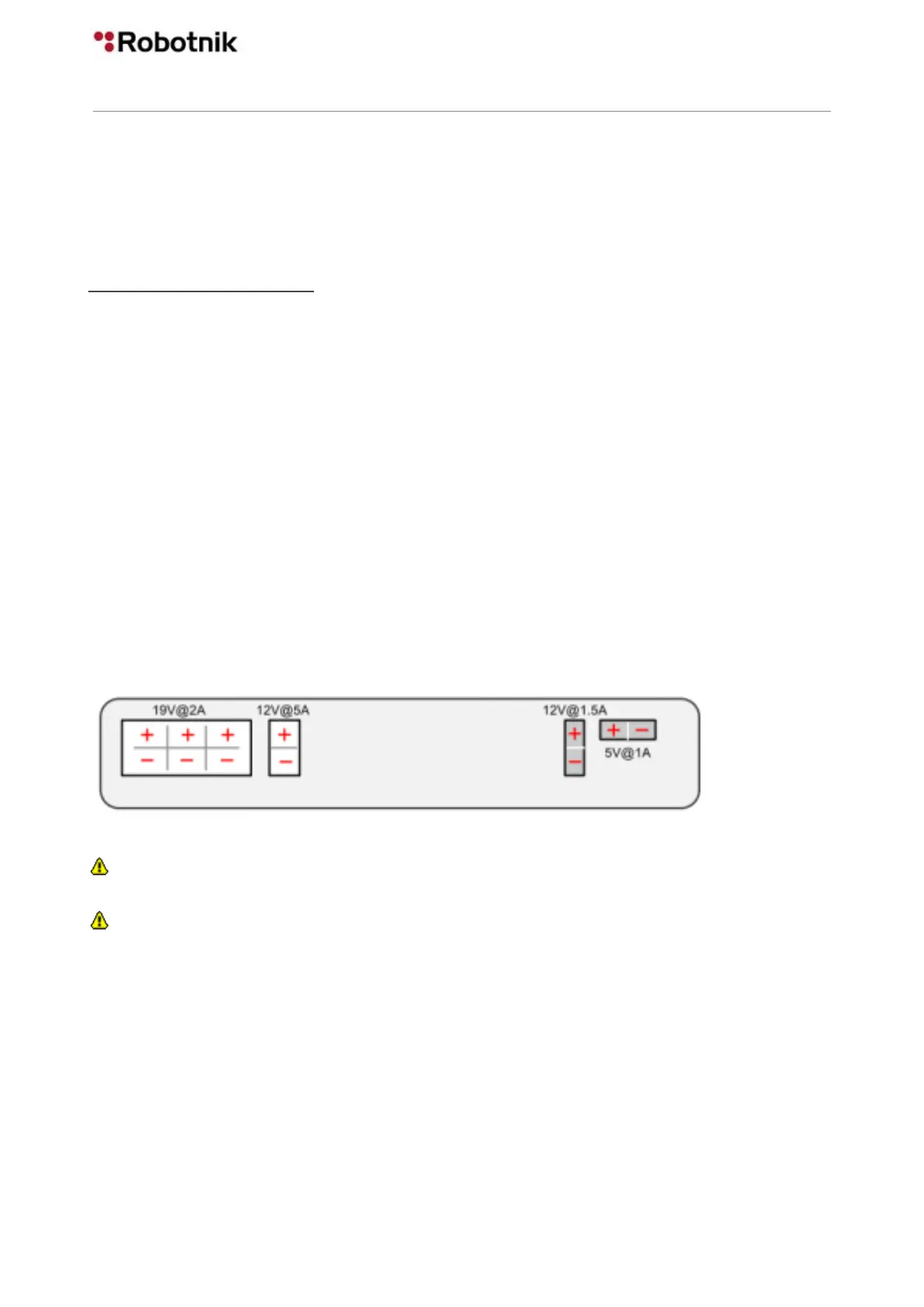
3.2 Connectors
Power
5V@1A Molex PN : 43650-0218 - for custom boards
12V@1.5A : Molex PN : 43045-0224 - specially supporting the kinect
12V@5A : Molex PN : 5566-02B2 - for high powered accessories (e.g. robotic arm)
19V@2A : Molex PN : 3928-9048 - for recharging netbooks
WARNING: This pin-out can differ from the Turtlebot 1. Please be careful when
connecting accessories.
WARNING: Please verify the pinout or the provided connector before connecting
any external device.
Cable
Note, if you click on the preceding links for the power connectors, under the heading
Mates with Part(s) you can find the compatible connector to use with each power source.
The most important one being of course:
12V@1.5A : Molex PN : 43025-0200 - specially supporting the kinect
8