Kobuki Turtlebot II. User’s Manual
5.3 Launching the RGBD camera
The openni_kinnect is the stack that contains the Kinect’s drivers.
It is recommended to connect the Kinect’s USB into a USB 2.0 slot.
Open a terminal and launch the openni node.
$> roslaunch openni_launch openni.launch
or
$> roslaunch astra_launch astra.launch
Or
$> roslaunch turtlebot_bringup 3dsensor.launch 3dsensor:=astra
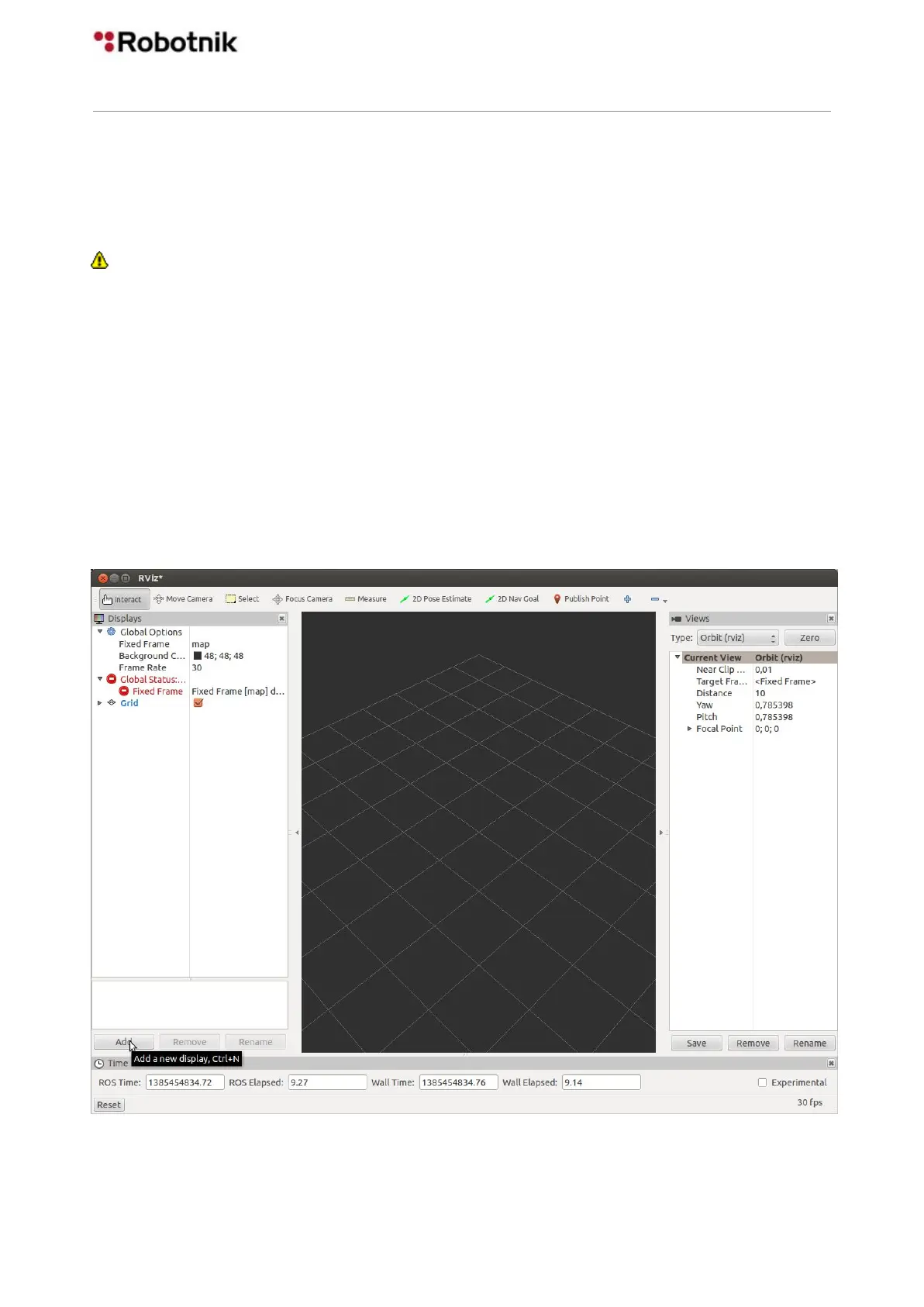
Testing the kinect with rviz
$> rosrun rviz rviz
Press Add Button and add a Camera:
29