Rockwell Automation Publication 750-RM100A-EN-P - August 2019 9
Adaptive Control Chapter 1
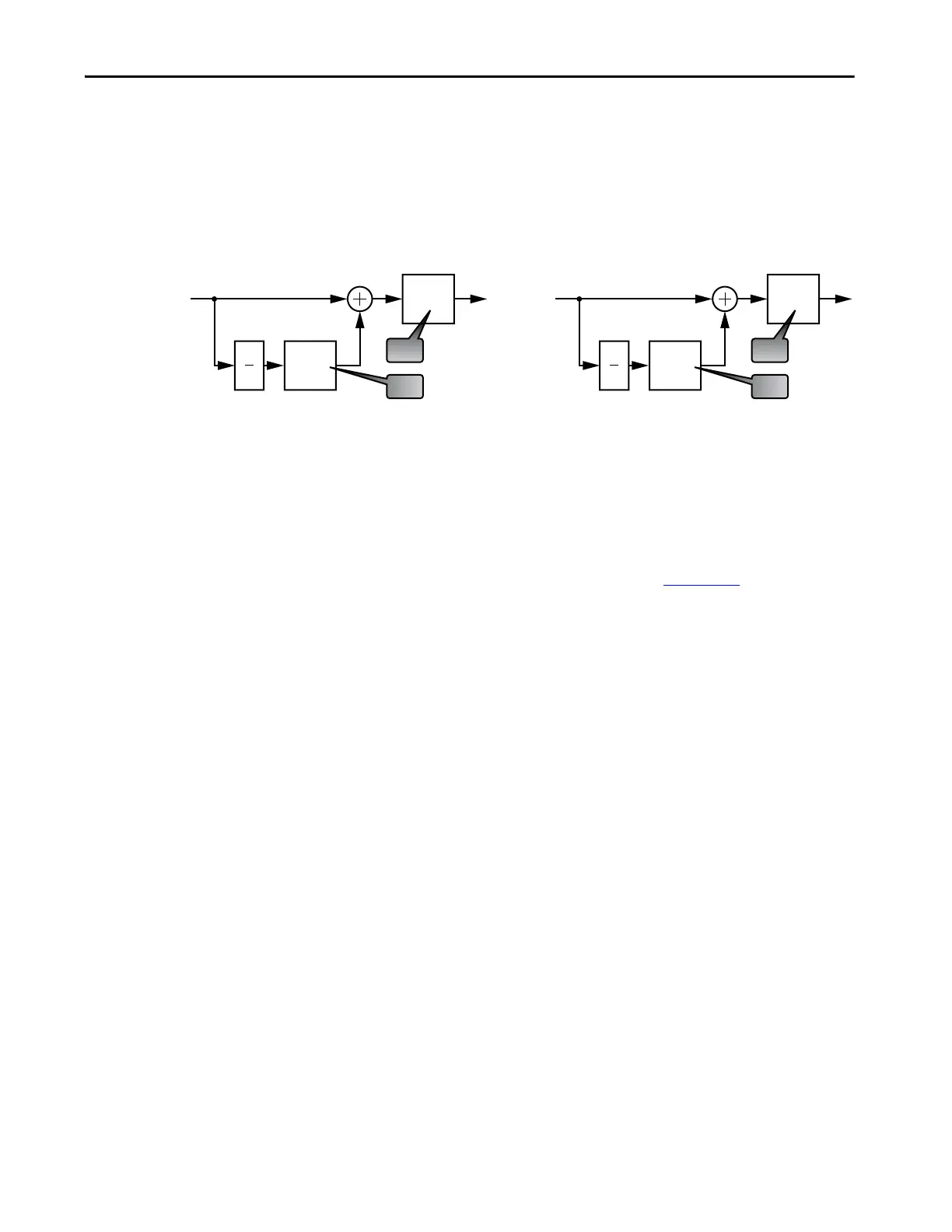
Position and Velocity
Regulators
The PowerFlex 755T utilizes a series form of a Proportional-Integral (PI)
controller for the Position Regulator (PReg) and the Velocity Regulator (VReg).
The proportional and integral gains are expressed in units of Hz. The
proportional gains have been normalized by removing inertia and represent
bandwidth which is a readily understood and measureable value. Relating the
proportional gains to bandwidth makes the tuning experience more intuitive.
Figure 1 - Regulator Schemes
The recommended method for tuning the position and velocity regulators is
adjusting the System Bandwidth parameter 10/11:906 [System BW]. By
adjusting the System bandwidth, the proportional and integral gains for the
position and velocity regulators are automatically calculated, which eliminates
the need to adjust each gain individually. For more information on the Position
and Velocity regulators and how to tune them, refer to the PowerFlex 755T Flux
Vector Tuning Application Technique, publication 750-AT006
.
Bus Observer
The bus observer feature is available in the PowerFlex 755T regenerative and low
harmonic AFE products. Bus observer was added to compensate for unknown
capacity changes in the system demand. Enhanced DC bus voltage regulation and
repeatability of control loop performance in the presence of unknown AC line
conditions are the main goals of the bus observer, rather than command tracking,
which allows for lower gain settings. Bus observer performs the following
functions:
• Enhances the regulation of the DC bus voltage control.
• Compensates for unknown capacity changes in the system demand.
• Compensates for the external connected capacitance that is less than three
times the bus supply.
• Uses current feedback to feed forward the bus voltage regulator.
PowerFlex 755TL/TR drives use power feed forward to enhance the DC bus
regulation. The inverter load is fed forward into the converter to improve DC
bus voltage regulation.
When the bus observer is not used, higher gain settings are required for a
sufficiently robust system. Higher gain settings cause heating of the inductors and
capacitor resonance trips. The accuracy of the total bus capacitance that is
entered directly affects overall performance.
[Hz]
[Hz]
1
s
2 K
PI
2 K
PP
[Hz]
[Hz]
1
s
2 K
VI
2 K
VP
Position Regulator
Velocity Regulator
 Loading...
Loading...













