EP Series User Manual
61
(2) Set the functions of digital input and output ports according to application needs
and actual wiring terminals. Among them, please set the function of the two IN
terminals to "Jog forward/Start-stop" and “Jog reverse/Direction" to control the
forward and reverse motion of the motor. For the function setting of IN terminal,
please refer to "Input port setting register [60~65]".
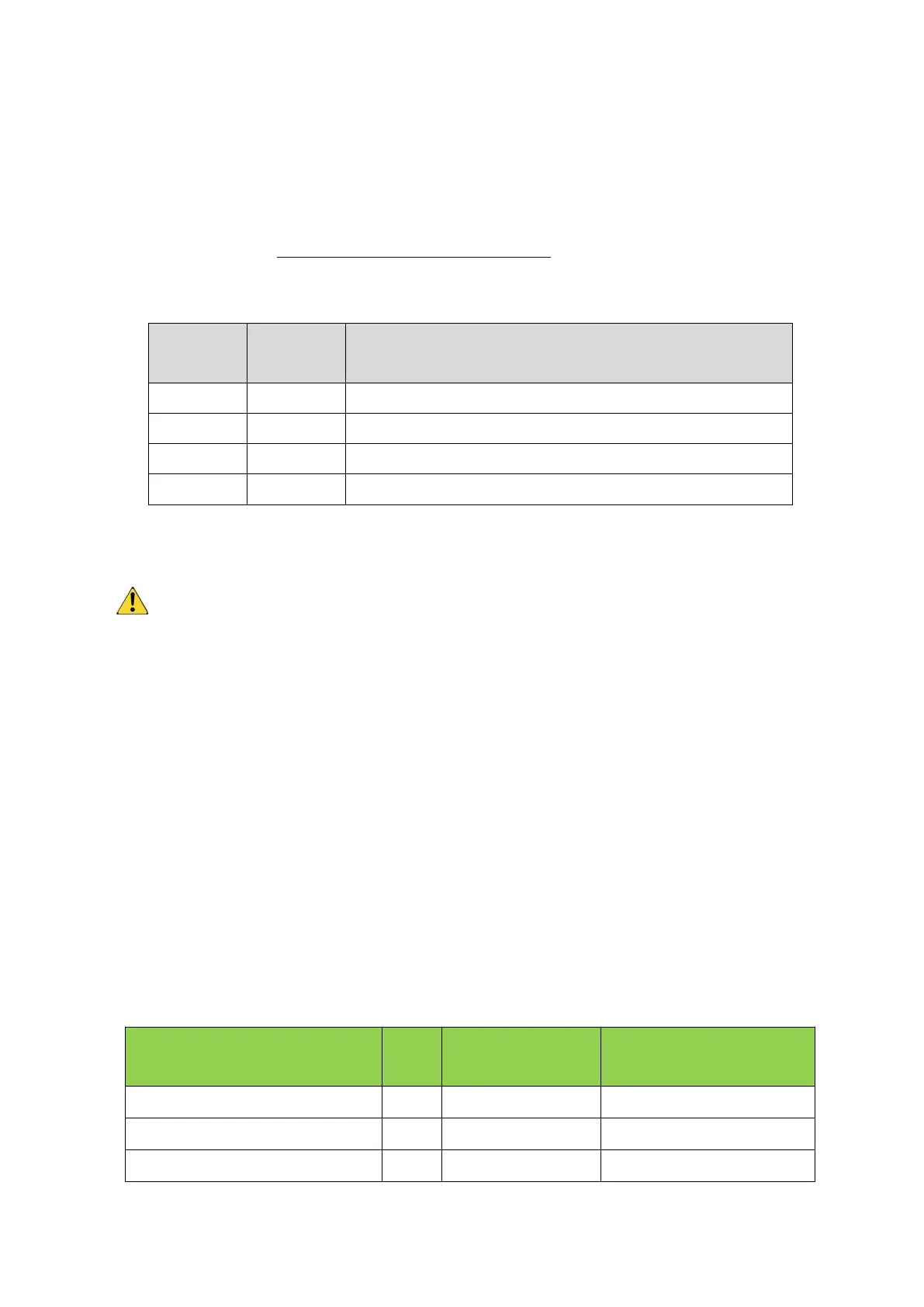
(3) Set motion parameters:
Table 4-4 Motion parameter settings in Forward + Reverse mode
Emergency stop deceleration
(4) Input the appropriate level through the corresponding IN port to control the forward
and reverse motion of the motor
Acceleration (register 75), deceleration (register 76), speed (register 77) and
emergency stop (register 78) can be dynamically changed during motor running,
and the driver will respond to these settings immediately.
To change the running direction while the motor is running, please cancel the
running signal in this direction first, and then give the running signal in the other
direction after the motor stops.
4.4. IO control: Speed table mode
This mode selects 16 speeds with up to 4 IOs. Normally, the first speed is set to 0,
which means the motor stops.
After switching the IO state, the new speed takes effect after the time set by
register 100. The related registers are as follows:
Table 4-5 Motion parameter settings in Speed table mode
Emergency stop deceleration
 Loading...
Loading...

