Chapter 5 Technical Information
TiM55x/56x/57x ranging laser scanner
26 © SICK AG · Germany · All rights reserved · Subject to change without notice 8015883/YZK8/2016-07-07
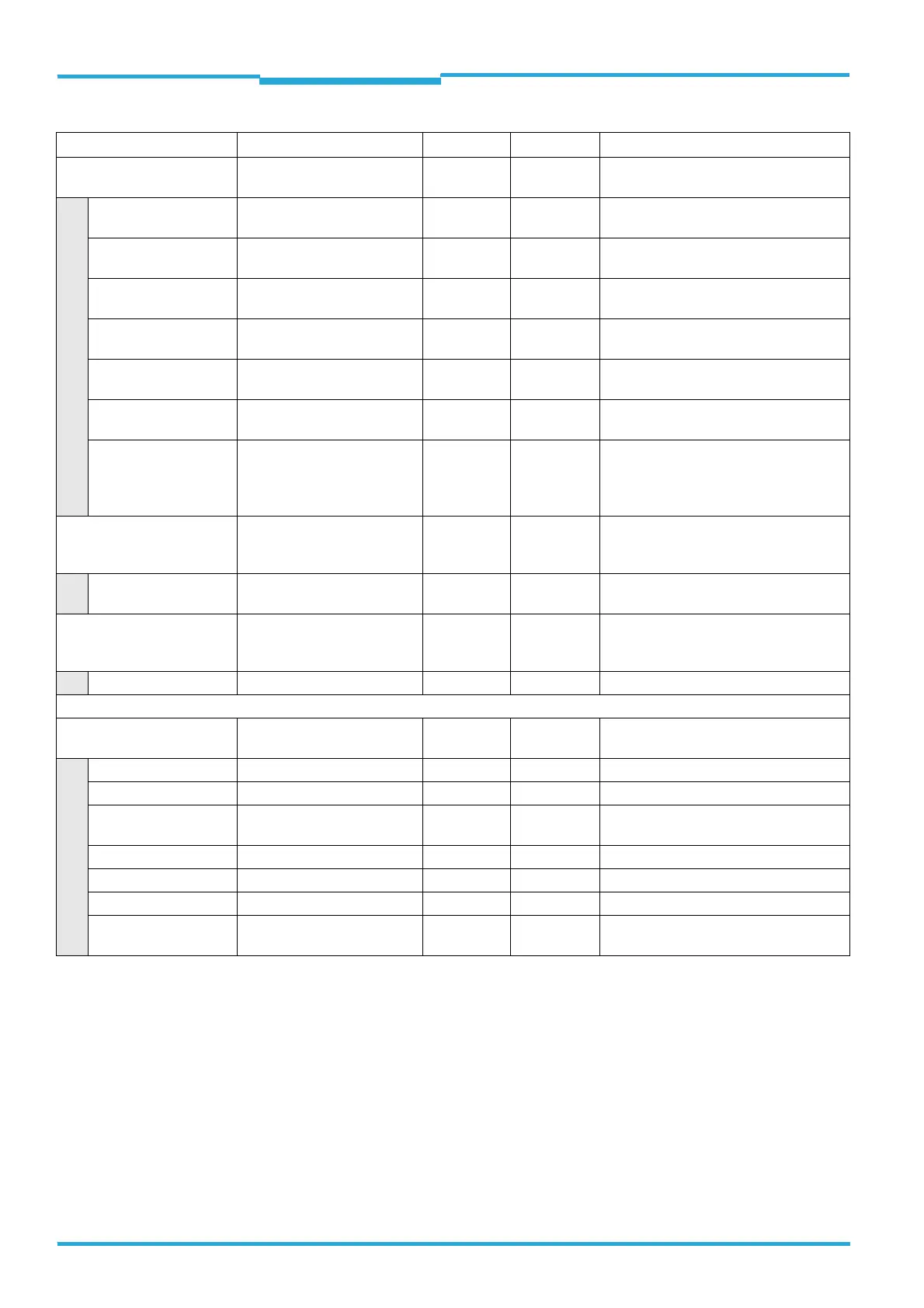
Measured value output
Position Defines the output of position
data
uint_16 2 0 No position data
(can not be changed)
Position information
X position XN coordinate of the sensor in
a coordinate system
Real 4 00000000h ... FFFFFFFFh
Y position YN coordinate of the sensor in
a coordinate system
Real 4 00000000h ... FFFFFFFFh
Z position ZN coordinate of the sensor in
a coordinate system
Real 4 00000000h ... FFFFFFFFh
X rotation XN rotation of the sensor in a
coordinate system
Real 4 00000000h ... FFFFFFFFh
Y rotation YN rotation of the sensor in a
coordinate system
Real 4 00000000h ... FFFFFFFFh
Z rotation ZN rotation of the sensor in a
coordinate system
Real 4 00000000h ... FFFFFFFFh
Type of rotation Kind of rotation Enum8 1 0 No rotation
1 Pitching
2 Rolling
3 Free rotation
Name Defines whether the TiM5xx
outputs the device name con-
figured with SOPAS ET
uint_16 2 0 No device name
1 Device name
(can be changed)
Device name Flexible range from 0 to
16 characters (20h … FFh)
string 0 ... 16 ..........
Comment Defines whether the TiM5xx
outputs the comment config-
ured with SOPAS ET
uint_16 2 0 No comment
(can not be changed)
Contents of comment Configured comment string 0 ... 128 ..........
RSSI = Received Signal Strength Indicator
Time information Defines whether the TiM5xx
outputs time information
uint_16 2 0 No time information
(can not be changed)
Time information
Year Year (4 digits) uint_16 2 0000h ... 270Fh
Month Month from 1 to 12 uint_8 1 00h ... 0Ch
Day Day of the month from 1 to
31
uint_8 1 00h ... 1Fh
Hour Hour from 0 to 23 uint_8 1 00h ... 17h
Minute Minute from 0 to 59 uint_8 1 00h ... 3Bh
Second Second from 0 to 59 uint_8 1 00h ... 3Bh
Micro second Micro seconds from 0 to
999,999
uint_32 4 00000000h ... 000F423Fh
Telegram part Description Variable type Length (byte) Value range
(contd.)

 Loading...
Loading...








