EN
47
0478 131 8354 D - EN
9. Energy mode
(RMI 632 C, RMI 632 PC):
In Standard, the robotic mower is
connected to the Internet at all times and
can be reached using the app. (Ö 10.)
In ECO, radio communication is
deactivated during rest periods to reduce
energy consumption; the robotic mower
cannot be reached using the app. The
most recent available data is shown in the
app.
11.11 Setting the rain sensor
In order to set the 5-stage
sensor, press the control pad to
the left or right. The current
value is displayed in the "Settings" menu
by means of a line diagram.
Moving the control influences
– the sensitivity of the rain sensor,
– the time the robotic mower waits for the
sensor surface to dry following rain.
In the case of medium
sensitivity, the robotic
mower is ready for operation
under normal ambient
conditions.
Move the bar further to the
left for mowing at a higher
humidity. If the bar is moved
all the way to the left, the
robotic mower will mow even
in wet external conditions and will not
interrupt the mowing operation if rain drops
land on the sensor.
Move the bar further to the
right for mowing at a lower
humidity. If the bar is moved
all the way to the right, the robotic mower
will only mow if the rain sensor is
completely dry.
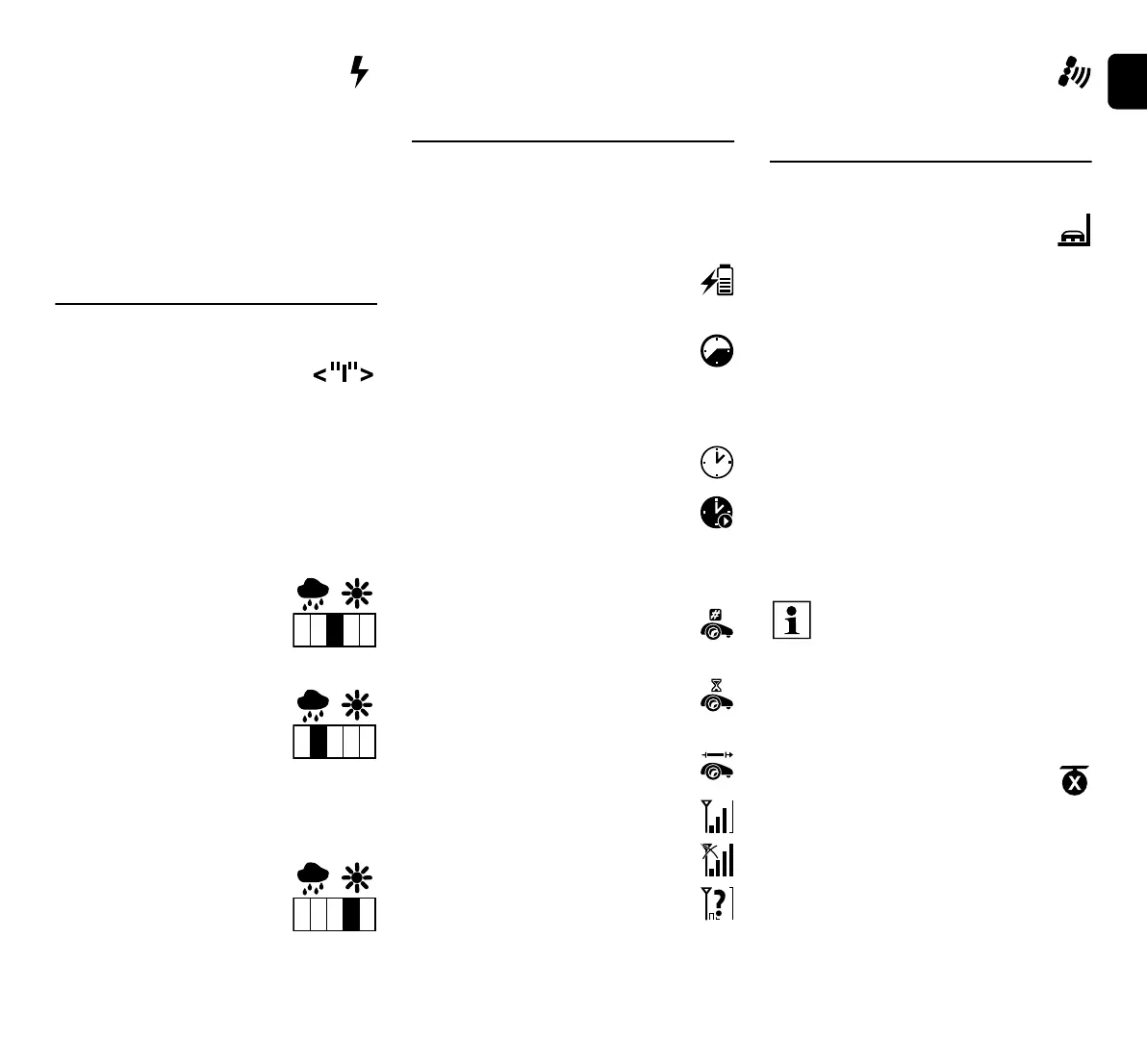
11.12 Setting the status screen
In order to configure the status screen,
select the left or right screen with the
control pad and confirm with OK.
Charge state:
Shows the battery symbol with the
charge state in percent
Rem. time:
The remaining mowing duration
during the current week in hours and
minutes. This display is only available with
the mow plan type "Dynamic".
Time and date:
Current time and current date
Start time:
Start of the next planned mowing
operation. During a running active
time, the text "Robotic mower active" is
displayed.
Mowing ops:
Total number of mowing operations
performed
Mowing hours:
Total duration of all mowing
operations performed
Distance:
Total distance covered
Network
(RMI 632 C, RMI 632 PC):
Signal strength of the mobile radio
connection with network ID. A small
x or question mark indicates that the
robotic mower is not connected to
the Internet. (Ö 11.3), (Ö 11.17)
GPS reception
(RMI 632 C, RMI 632 PC):
GPS coordinates of the robotic
mower. (Ö 11.17)
11.13 Installation
1. Passage:
Switch offset drive home on and off.
When the passage is activated, the
robotic mower travels back home to the
docking station, offset at a distance, along
the perimeter wire.
Three versions can be selected:
Off – Default setting
The robotic mower travels along the
perimeter wire.
Narrow – 40 cm
The robotic mower alternately travels
along the perimeter wire or offset by
40 cm.
Wide – 40 - 80 cm
The distance to the perimeter wire is
selected randomly within this passage
during each drive home.
2. Starting points:
The robotic mower either starts the
mowing at the docking station
(default setting) or at a starting point.
Starting points are to be defined
– if partial areas are to be travelled to in a
targeted manner because they are
insufficiently mowed,
In conjunction with an external
docking station as well as with
corridors and confined areas,
guide loops must be installed for
offset drive home. (Ö 12.12)
Observe a minimum wire clearance
of 2 m for offset drive home.
 Loading...
Loading...










