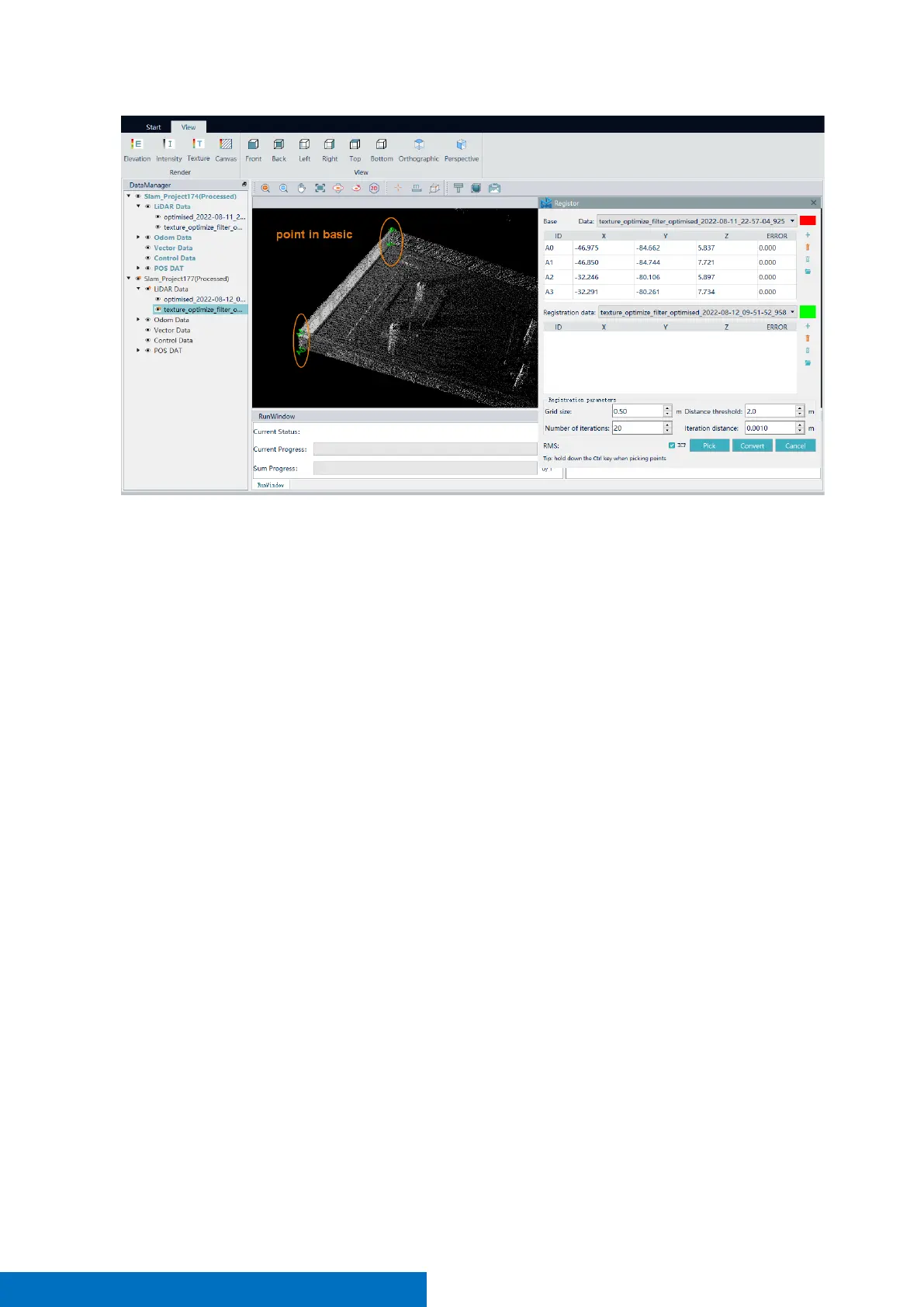
• Select at least 3 pairs of points with the same name in basic point cloud and registered point cloud, The
order of same name point must be consistent.
• Adjust the registration parameter (ICP), when registration RMS of error meets precision requirements,
click convert to complete registration. The meanings of ICP parameter are as follow:
1. Grid size: Point cloud tile grid size.
2. Number of iterations: The number of iterations of the ICP algorithm, generally 20.
3. Distance threshold: the maximum distance between points with the same name. If the searched
matching point is greater than the threshold, it will not participate in the calculation.
4. Iterative distance: the difference between the distances calculated before and after, if it is less than
this value, exit the iteration.
5. RMS is the root mean square error related to registration.
 Loading...
Loading...
