AFMS
N'
D07
FOR
GARMIN
GFC700
AUTOPILOT
AND
VARIABLE
PITCH
PROPELLER
EQUIPPED
AEROPLANES
~TECNAM
[r~@1J@
c
,&tl[f©li'@OO
[FO~@IJuU
~&)[fil!!!Jfru0
PageAPVl
-J
I
13.2.2
NON
ALTITUDE
CRITICAL
MODES
(VS,
VNAV,
IAS)
When the
airspeed
trend
vector
(dedicated algorithm) reaches 65 +/- 2 KIAS a single aural
··AJRSPEFD will sound, alerting the pilot to the impending under- speed condillon. wluch
requm:s pilot action.
If
the aircrafi
is
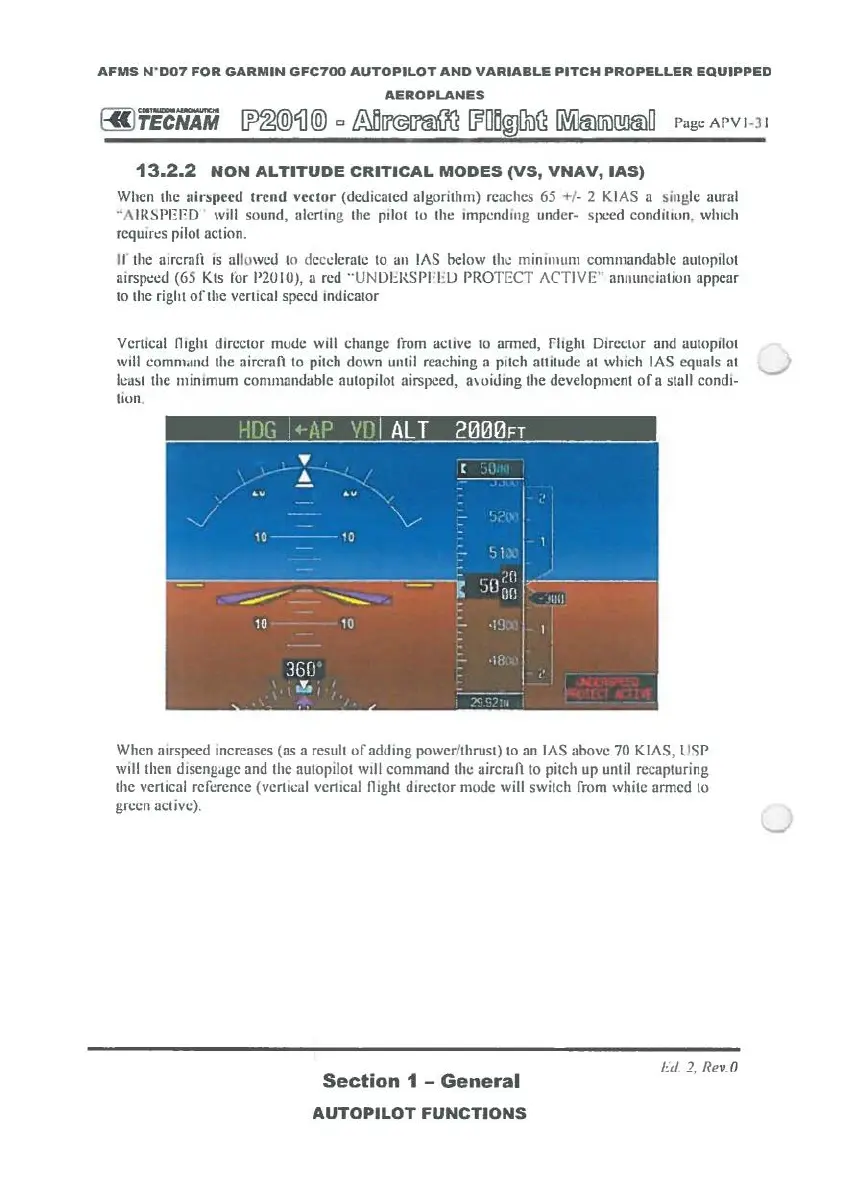
allowed 10 decelerate to an IAS below the mini
111u111
com111andable autopilot
airspeed (65 Kts for 1'2010), a red
..
UN
DERSPl'
ELJ
PROTECT ACTIVE
,.
anuuncrntion appear
to the right
of
the vertical speed indicator
Vertical night director mode will change from active to armed, l'hght Director and autopilot
will comm,md the aircrafi to pitch down until reaching a pitch attitude at which IAS equals at
....)
ll:a~l
the
111inimum
commandable autopilot airspeed,
a\oiding
the development
ofa
stall condi-
tion.
HOG
I
+-AP
VD
I
ALT
2000FT
When airspeed increases (as a result
of
adding
power
/thrust) to an IAS above 70 KIAS, U
SP
will then disengage and the autopilot will command the aircrafi to pitch up until recapturing
the vertical reference (vertical vertical flight director mode will switch from white armed lo
green active).
Section
1 -
General
AUTOPILOT
FUNCTIONS
l~d
2,
Rev.
0