Step 1: Increase MPET Open loop current reference [MPET_OPEN_LOOP_CURR_REF]
Step 2: Decrease MPET open loop slew rate [MPET_OPEN_LOOP_SLEW_RATE]
Step 3: If this fault persists, check motor datasheet for motor BEMF constant in mV/Hz and program Motor
BEMF Constant [MOTOR_BEMF_CONST] in the “Control configuration – Motor Parameters” tab in All tuning
settings section in the GUI.
Equation 3 and Equation 4 can be used to convert Ke in mV/rpm and torque constant to Ke in mV/Hz.
BEMFConstantin
mV
Hz
= BEMFConstant
mV
rpm
×
60
Polepairs
(3)
BEMFconstant
mV
Hz
= Torqueconstant
mNm
A
×
2π
Polepairs
(4)
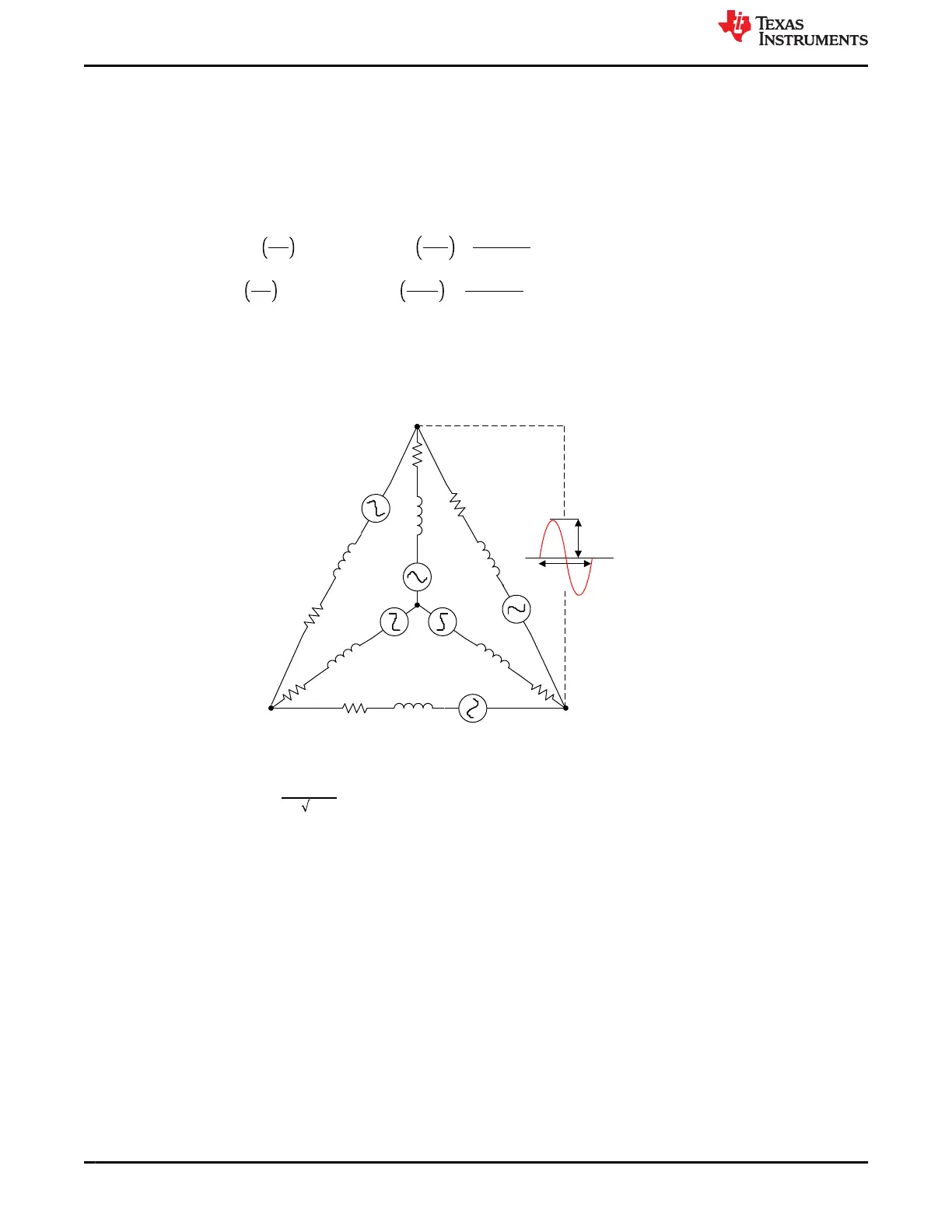
Step 4: If the motor does not have a datasheet, then measure the voltage across any two phases of the motor
using an oscilloscope by manually spinning the motor. A sinusoidal or trapezoidal voltage should appear on the
oscilloscope. Measure the peak voltage E
PH
in milli-volts and time period T
E
in seconds as shown in Figure 3-4.
Calculate BEMF constant Ke as shown in Equation 5.
Phase A
Phase B
Phase C
CT
L
PH
R
PH
E
PH_A
L
PH
R
PH
E
PH_
C
L
PH
R
PH
E
PH
_B
E
PH
T
E
Kt
PH_N
= (1/sqrt(3)) *E
PH
* T
E
L
PH
R
PH
E
PH
_
A
L
PH
R
PH
E
PH_B
L
PH
R
PH
E
PH
_
C
Figure 3-4. Motor BEMF Constant
BEMFConstantKe =
E
PH
× T
E
3
(5)
3.6.3 Abnormal BEMF Fault [ABN_BEMF]
This fault gets triggered when the estimated BEMF voltage drops below the programmed Abnormal
BEMF threshold % [ABNNORMAL_BEMF_THR] of the programmed or MPET estimated BEMF constant
Ke [MOTOR_BEMF_CONST] which is programmed as 40% (default value). For example, if the estimated /
measured Ke is 5 mV/Hz and programmed Abnormal BEMF threshold is 40%, this fault gets triggered when the
estimated Ke drops below 2 mV/Hz. This fault can also get triggered when the programmed Ke is inaccurate.
Step 1: Estimated BEMF voltage drops when the motor speed drops. Motor speed can drop due to load
dynamics (sudden change in load). For applications with load dynamics, we expect speed to drop and recover
back. Because the speed drops, the BEMF voltage will also drop and can trigger this fault. For such applications,
it is recommended to set the Abnormal BEMF threshold to 10% to avoid triggering this fault.
Step 2: This fault can get triggered if the programmed Ke is inaccurate. Follow steps recommended in Section
3.6.2 to obtain accurate Ke.
3.6.4 Lock Current Limit [LOCK_LIMIT]
This fault gets triggered when the motor is loaded above the stall torque of the motor.
Essential Controls www.ti.com
10 MCF8316A Tuning Guide SLLU335A – AUGUST 2021 – REVISED JANUARY 2022
Submit Document Feedback
Copyright © 2022 Texas Instruments Incorporated