PDx-170-57-E / TMCM-170 Hardware Manual (V1.10 / 2011-NOV-24) 17
Copyright © 2011, TRINAMIC Motion Control GmbH & Co. KG
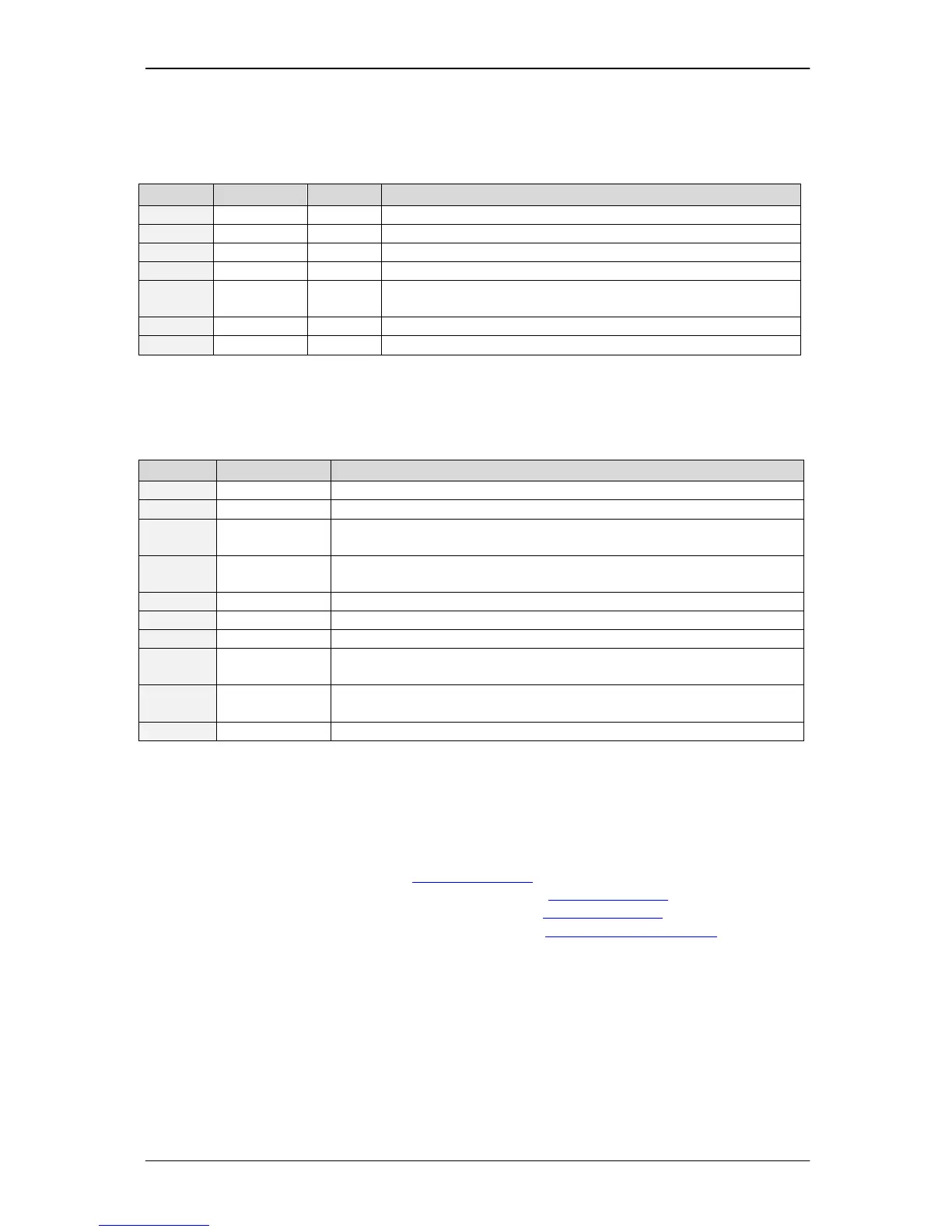
7 Revision history
7.1 Document revision
Added Documentation Revision and PANdrive™ information
Update of dimensions and pictures
Encoder graphics added (chapter 6.3)
PANdrive™ encoder resolution info corrected to 2000 per
rotation
Chapter v5.1 extended; Appendix with TMCL-code
New order codes, new front page, minor changes
Table 7.1: Document revision
7.2 Firmware revision
Attention: Use Documentation V0.90 or later for connector pinning!!!
Added encoder N-channel initialization
Added encoder N-channel for automatic correction and encoder error
flag
Allows specifying of CHA and CHB polarity for nulling of encoder –
uses higher bits of Encoder Null Polarity
Added operation mode with hall sensors only.
Added standalone mode feature
Fixed RS485 delay problem (master had to wait for timeout time before
sending new command), when multiple units share a bus
Added TMCL™ standalone program capability, extended command set
for TMCL™. Up to 64 commands can be stored in EEPROM.
Table 7.2: Firmware revision
8 References
TMCL™ Manual, www.trinamic.com
Reference and Programming Manual, www.trinamic.com
QBL5704 BLDC servo motor manual, www.trinamic.com
HEDS-5640#A12 encoder information http://www.avagotech.com