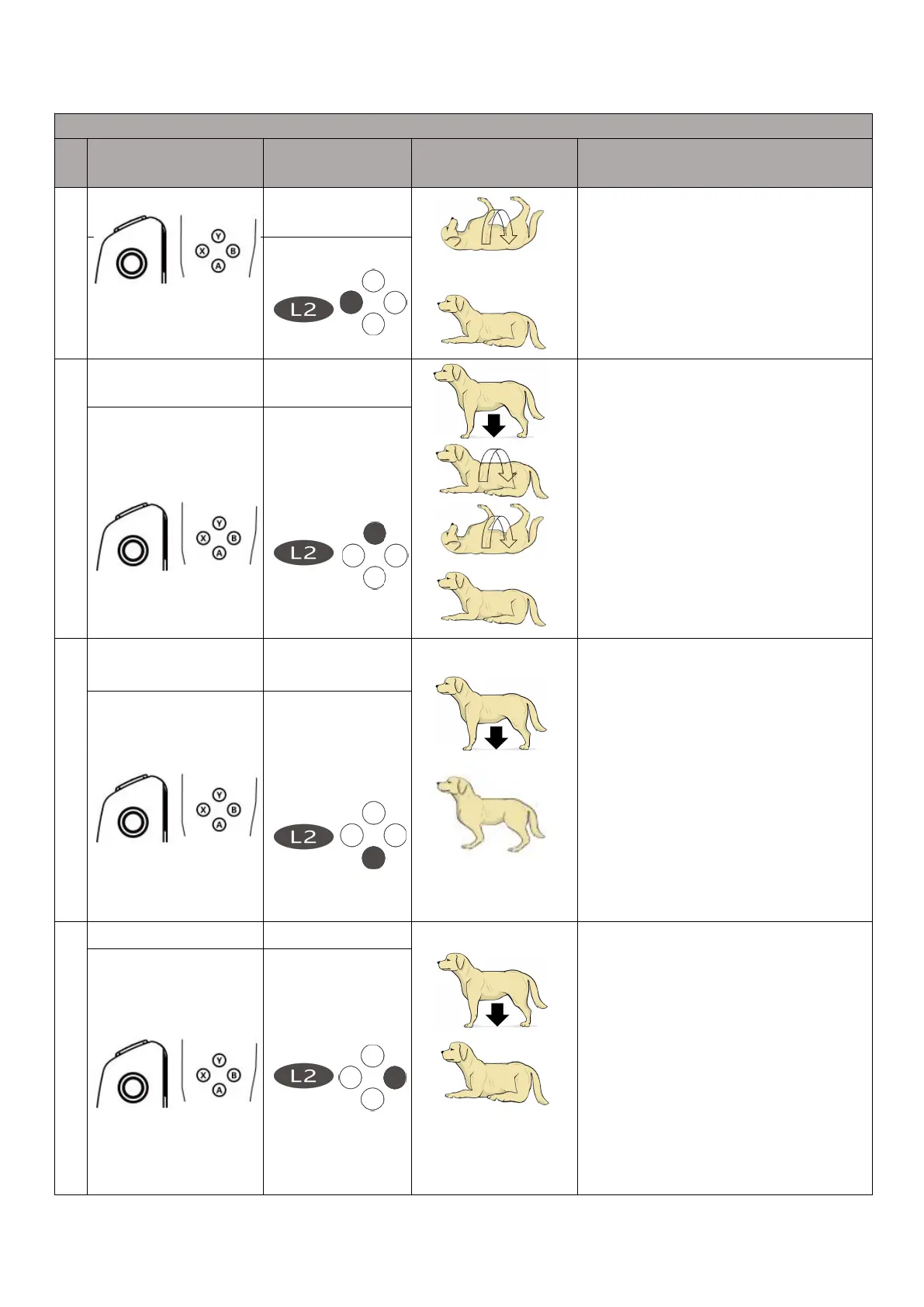
2.Combined Action and Special Action under “A Mode”
The Position of Stick or
Button on Joystick
L2 Button
Right Button-“X”Button
L2 Button
Right Button-“X”Button
When the robot dog is standing in Sport mode, when
the robot is lying on its back, hold down the L2 key
and press the X key to roll the robot 180° to the right.
After rolling, the robot is in the supine state and the
joints are in the high-damping state. Hold down the
L2 key and press the single right button-a button to
perform semi-squat and standing movements
successively. Press START to release the joint locking
state and enter the normal operation mode.
Note:Do not use this function after configuring lidar,
otherwise the lidar or robot will be damaged.
L2 Button
Right Button-“Y”Button
L2 Button
Right Button-“Y”Button
When the robot dog is standing in Sport mode, press
L2 and then Y and the robot rolls 360° to the
right.After rolling, the robot is in the supine state and
the joints are in the high-damping state. Hold down
the L2 key and press the single right button-a button
to perform semi-squat and standing movements
successively. Press START to release the joint locking
state and enter the normal operation mode.
Note:Do not use this function after configuring lidar,
otherwise the lidar or robot will be damaged.
L2 Button
Right Button-“A”Button
L2 Button
Right Button-“A”Button
When the robot dog is standing in Sport mode, after
holding down the L2 key and repeatedly clicking the
right button-A button, the robot joint will be locked .
When the robot in half squatting state, the joint will
be locked, and robot can manually raised from one
place to another place.
Note: Press the L2+A button only when the robot is
in a static standing position. Do not press the L2+A
button while walking, otherwise the robot will fall and
be damaged.
L2 Button
Right Button-“B”Button
L2 Button
Right Button-“B”Button
After holding down the L2 key and single-clicking the
B key, the robot will enter the zero torque mode (in
this mode, the remote control can be used to
calibrate the joint zero point; in this mode, the
remote control L1+B can be used to calibrate the IMU
installation error)