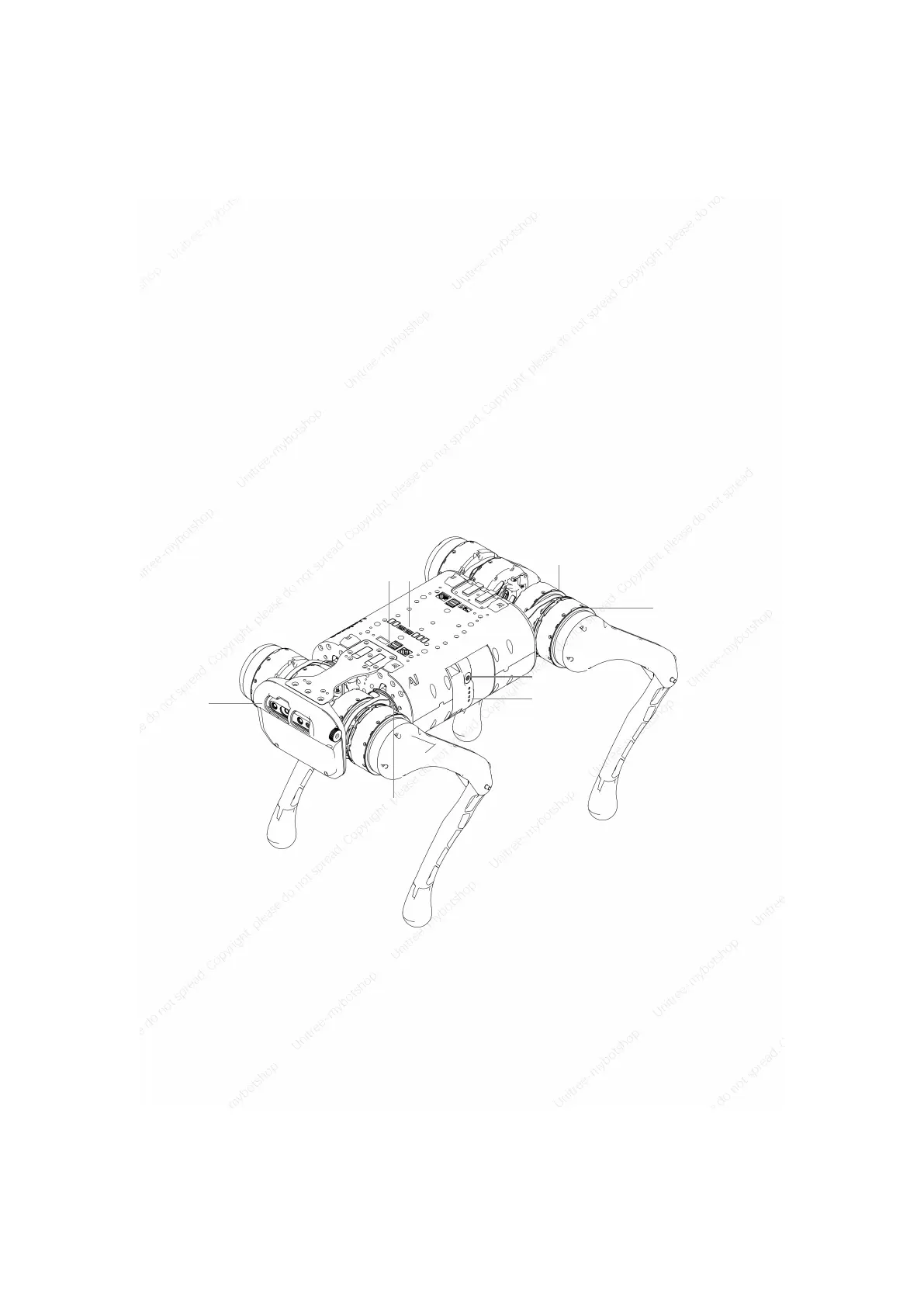
A1
The optimal design of joint parts makes the quadruped robot not only reduce the cost,
but also greatly improve the motion performance and service life. In Sport mode, the
maximum joint speed of 21rad/s allows A1 to speed up to 3.3m/s in an instant, possess
excellent balance ability; and the torque of 33.5NM allows A1 to easily achieve backflip;
the joints can be quickly disassembled and easy to maintain. The addition of a multi-eye
depth camera allows the quadruped robot platform to have intelligent applications such
as real-time image transmission (image transmission quality 720P / 30fps) and character
following; and supports secondary development. With optional lidar, extended functions
such as dynamic obstacle avoidance, navigation planning, autonomous positioning, and
map construction can be completed; optional NVIDIA TX2 can be used for visual SLAM
and gesture recognition. At the same time, A1 supports APP control for Android and IOS.
1.
Multi-Eye depth camera
& & 5.
Power switch
2.
Developing reserved communication interfaces
& 6.
Battery Indicator
3. Developing reserved power interfaces & 7. Thigh motor& Reducer
4. Body motor& Reducer 8. Calf motor& Reducer