16
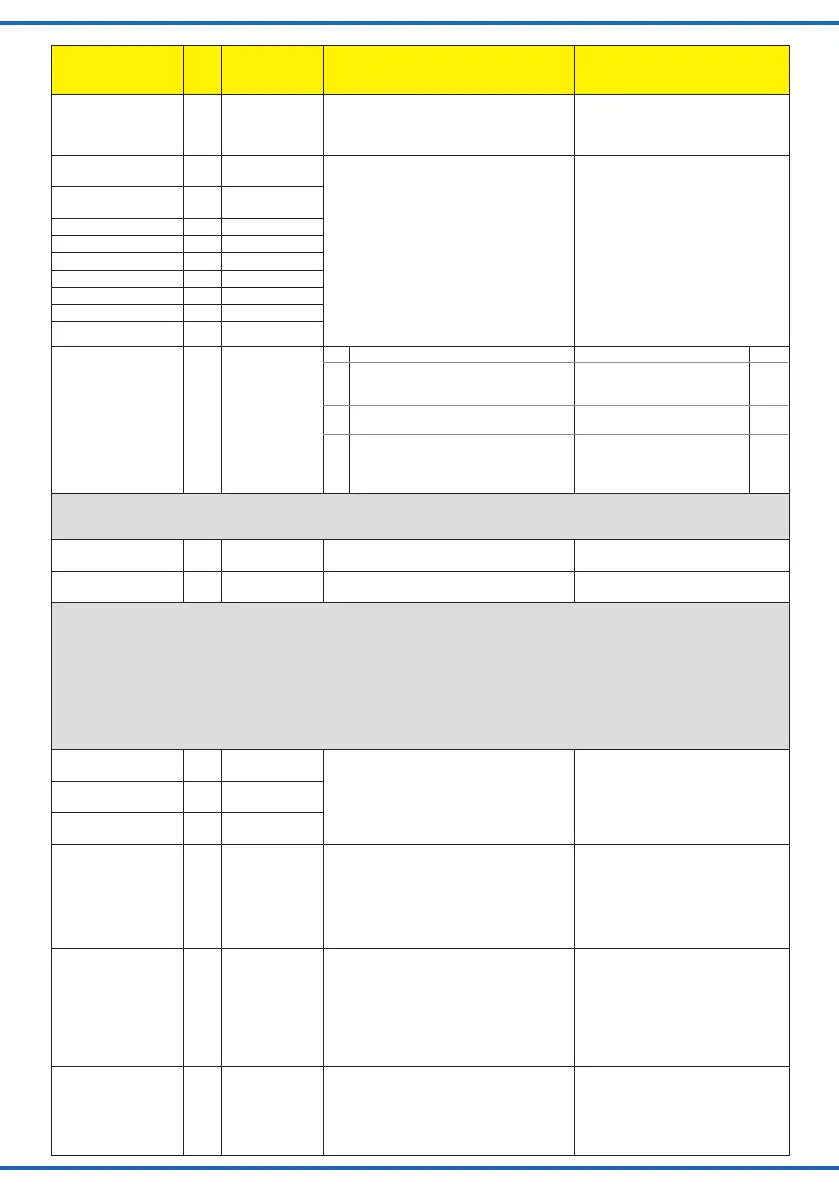
Name der CV
Name of CV
CV-
Nr.
No.
Eingabewerte
(Default)
Value range
Erläuterungen / Hinweise
Remarks
Fehler-Information
Error information
30 (0) Nur lesbar oder auf 0 zurücksetzbar
Bit 0: Abgeschaltet wegen Überhitzung
Bit 1: Kurzschluss am Motor
Bit 2: Überlastung an Funktionsausgängen
Only writable with the value “0”
Bit 0: Overtemperature
Bit 1: Short-circuit on motor
Bit 2: Overload on the function outputs
F0inVorwärtsfahrt
Forward drive
33 0 … 31 (1) Deniert,welcheFunktionstastenwelche
Decoderausgänge steuern.
Wert 1: AUX1
Wert 2: AUX2
Wert 16: Rangiermodus
Bsp.:AUX2mitF5schaltenCV39=2
Bsp.:AUX1und2mitF6schaltenCV40=3
(=1+2)
(CV33bzw.34=Wert0umeineSchaltung
mitF0zuverhindern)
Indicates which function inputs control
which decoder outputs.
Value 1: AUX1
Value 2: AUX2
Value 16: Shunting mode
Example: to control AUX2 with F5:
CV 39 = 2
to control AUX1 and AUX2 with F6:
CV 40 = 3 (= 1+2)
(CV 33 resp. 34 = 0 to hinder F0)
F0 in Rückwärtsfahrt
Backward drive
34 0 … 31 (2)
F1 35 0 … 31 (0)
F2 36 0 … 31 (0)
F3 37 0 … 31 (0)
F4 38 0 … 31 (16)
F5 39 0 … 31 (0)
... ...
F12 46 0 … 31 (0)
Fahrverhalten
Control settings
47 0 ... 7 (0) Bit
0
1
2
VerhaltennachStromunterbrechung:
Letzte Geschwindigk. sofort aufnehmen
Beschleunigungsrampeverwenden
Kein Nothalt bei Richtungswechsel
Nothalt bei Richtungswechsel
Regelung bei höchsten Fahrstufen aus
Regelung bei höchsten Fahrstufen ein
Behaviour after power-fail:
Resume speed immediately
Accelerating gradually
Gradual halting on dir. switch
Emergency stop on dir. switch
Load-reg. at the highest speed
steps o
Load-reg. at the highest speed
steps on
Wert
0
1
0
2
0
4
OhneRegelungbeidenhöchstenFahrstufenstehteinehöhereMotorleistungzurVerfügung.
Without load-regulation at the highest speed steps the motor has more output power.
Vorzugsprotokoll
Preferred protocol
48 0,1(0) 0=DCC;1=Motorola 0 = DCC; 1 = Motorola
Multiprotokoll
Multi-protocol
49 0…255(50) Wartezeit bei Protokollwechsel Time until switching protocols.
WennderDecodernichtmehrunterseinembisherigenProtokolladressiertwird,dannversuchterdasalternativeProtokoll.Erkann
währenddesBetriebszwischenDCCundMMumschalten.DieZeitist0,1Sekunden
x
CV(Bsp.:Wert20=2Sek.)WennderDecoder
eineAdresseauchimalternativenProtokollnichtndet,dannwirdergestoppt.Wert0bedeutet,dassdieseFunktionnichtaktivistund
der Decoder während des Betriebs das Protokoll nicht wechselt. Einige Zentralen, z. B. EcoS, adressieren gestoppte Loks nicht dauer-
haft.InsolchenFällenistesempfehlenswert,dieseCVauf0zusetzen.
If the decoder is no longer addressed in its actual digital protocol for a time period, it tries the alternative, by switching between DCC and
MM. The time is 0.1 seconds
x
CV 49 (e. g. a value of 20 means 2 seconds). If the decoder is not addressed even in the alternative pro-
tocol, it stops. A value of 0 means this function is not active, and the decoder does not switch protocols while in operation. Some digital
stations, like the EcoS, do not address stopped locomotives periodically, in this case it is recommended to turn this feature o.
Lastregelparameter KP
Load control parameter KP
51 0…255(120) Reglerparameter. Parameters for the motor load control.
LastregelparameterKI
Load control parameter KI
52 0…255(100)
Lastregelparameter KD
Load control parameter KD
53 0…255(50)
Lastregelung Mess-
lücke
Motor control meas-
urement gap
54 0…255(25) Bestimmt die Zeit in 50 µs Schritten, wie
lange die Motorspannung abgeschaltet
seinmuss,bevordieEMK-Messungerfolgt.
GrößereWerte(relativzuCV55)führenzu
besseremVerhaltenbeiMotorenmitvielen
Störungen, aber liefern insgesamt weniger
Energie.
Indicates a time period in 50µs steps
when the motor voltage is turned
o before the measurements begin.
Larger values (depending on CV 55)
result in smaller measurement noise,
but result in less total energy.
Lastregelung Periode
Motor control period
55 0…255(5) Regelgeschwindigkeit in ms. Kleine Werte
führen zu besseren Langsamfahreigenschaf-
ten insbesondere bei kleinen Motoren oder
Motoren mit sehr wenig Schwungmasse,
können aber bei einigen Motoren zu erhöhter
Geräuschentwicklung führen. Motoren mit
großerSchwungmassekönneninderRegel
größereWertehaben.
Length of motor control cycle in ms.
Smaller values can result in ner
slow movement especially for smaller
motors or motors with very small
ywheels, but might result in louder
movement. Motors with bigger y-
wheels can work well with somewhat
larger values.
Leistungserhöhung bei
Fahrstufen
Increase in power at
the speed steps
56 Einstellung für die Leistungserhöhung bei den
höchsten Fahrstufen. 0 = keine Erhöhung, 5
= maximale Erhöhung. Falls ein hoher Wert
zum Ruckeln der Lok bei hoher Geschwindig-
keitführt,musserwiederverkleinertwerden.
Adjustment of the possible increase
in power at the highest speed steps.
0 = no increase, 5 = max increase. If
the loco does not run smooth at high
speed steps you have to reduce the
value.
 Loading...
Loading...