Date: 08/01/05, Rev: 05-08 Page 4 of 17 TM.F7SW.096
2.0 Changes from Standard Product
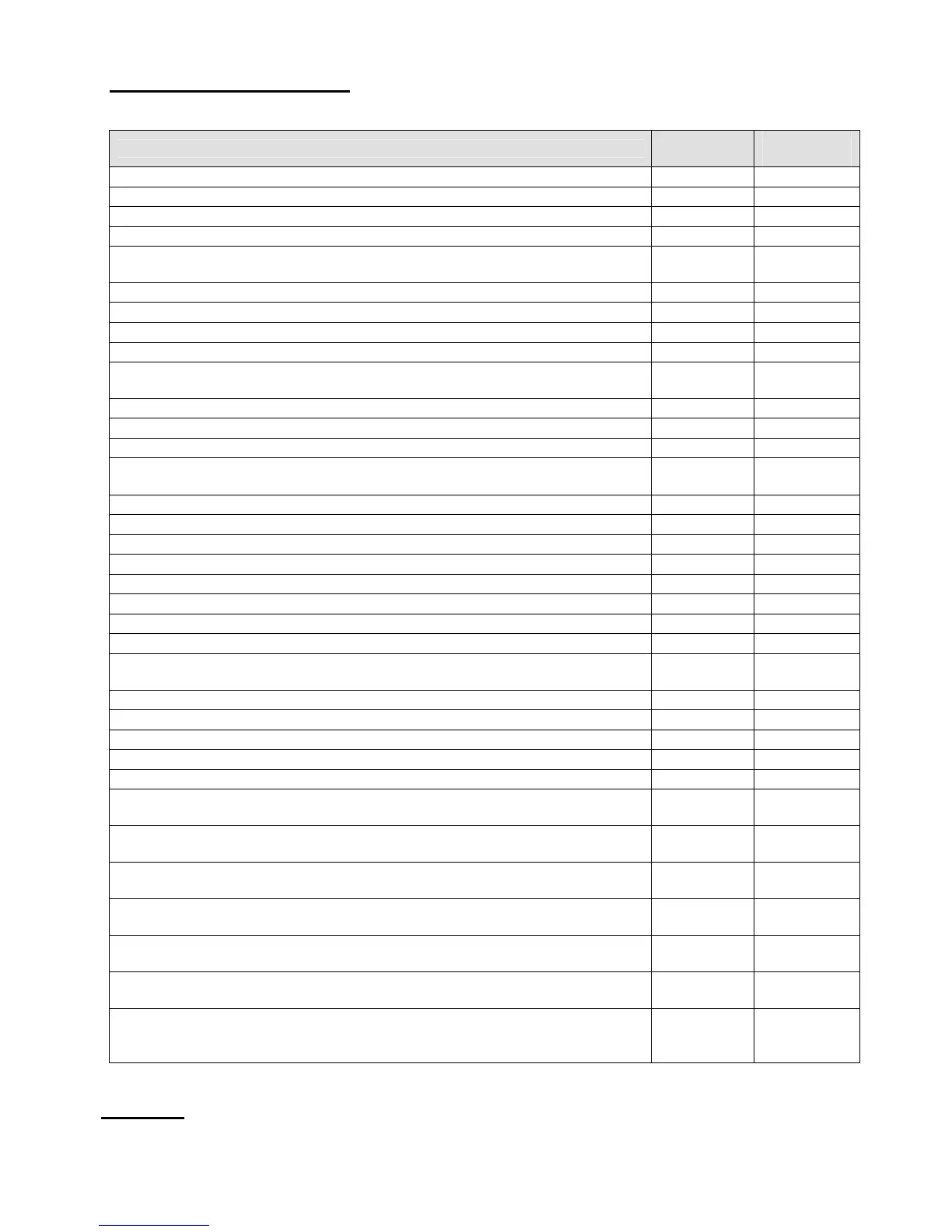
2.1 Enhanced PID versus Standard Software
Feature
Enhanced
PID
Standard
Software
Full Range PID (2-input)
√ √
PID + Frequency Reference Capable (3-input)
√ √
PID x Frequency Reference Capable (3-input)
√
PID Setpoint Offset Parameter
√
PID + Trim is Accomplished Algebraically, Regardless of Commanded
Direction
√
Frequency Reference as PID Setpoint
√ √
Parameter B5-19 “PID Setpoint” can be changed during running
√
Independent Digital PID Setpoint
√ √
Independent Digital PID Setpoint (changeable during run)
√
Multiple PID Setpoint Sources (digital preset, analog, pulse input, Modbus
RTU, option card)
√ √
Setpoint Ramp (when PID setpoint is from frequency reference)
√ √
Setpoint Ramp (all PID setpoints, regardless of source)
√
Multiple PID Feedback Sources (analog, pulse input)
√ √
Feedback Detection (high, low, on-delay, off-delay, digital output, alarm,
fault, during run, always detected)
√
PID Monitors with User Units (scaled using parameter O1-03)
√
Detailed PID Monitors (proportional, integral, derivative)
√
Integral Hold Digital Input
√ √
Positive Integral Hold Digital Input (integrator can only decrease)
√
Negative Integral Hold Digital Input (integrator can only increase)
√
Integral term is lower-limited to PID minimum output
√
Integral term is held during sleep and the sleep minimum off time
√
PID Output Limit
√ √
Independent + / - PID Output Limits (B5-06 PID limit now functions only as a
PID upper limit)
√
PID Output Gain can be proportional to the frequency reference
√
PID Output Gain (0.01 Resolution, instead of 0.1)
√
Independent “Sleep Delay” and “Wake-up Delay” parameters
√
Increased range for sleep mode timers (0.0 ~ 600.0 sec)
√
Minimum sleep time parameter
√
Parameters O1-01 and O1-02 have been removed. Parameters P2-09 and
P2-10 have taken their place
√
Parameter O1-03 controls the units & scaling for U1-01, D1-XX, and U1-90
thru U1-96
√
Parameter P2-10 controls the units & scaling for U1-02, U1-05, U1-20, and
U1-46
√
Parameter P2-09 controls the displayed keypad custom units for D1-XX,
U1-01, U1-02, U1-05, U1-20, U1-46, and U1-90 thru U1-96
√
Keypad monitors are now displayed in a different order: U1-01 -> U1-90 ->
U1-02 -> U1-03 -> ….. U1-96 -> U1-01
√
PID Setpoint (U1-01), PID Feedback (U1-90), and Output Frequency (U1-
02) are displayed at power-up and return to drive mode
√
Multi-function digital output for controlling the “Blowdown” valve. When the
“Blowdown” valve is energized, the air compressor can make air. Controlled
by PID feedback level, drive run status, and delay timers.
√
3. Limitations
None.
 Loading...
Loading...










