2 Installation and commissioning
2.2.2. Working range
433HAC026660-001 Revision: C
© Copyright 2006-2008 ABB. All rights reserved.
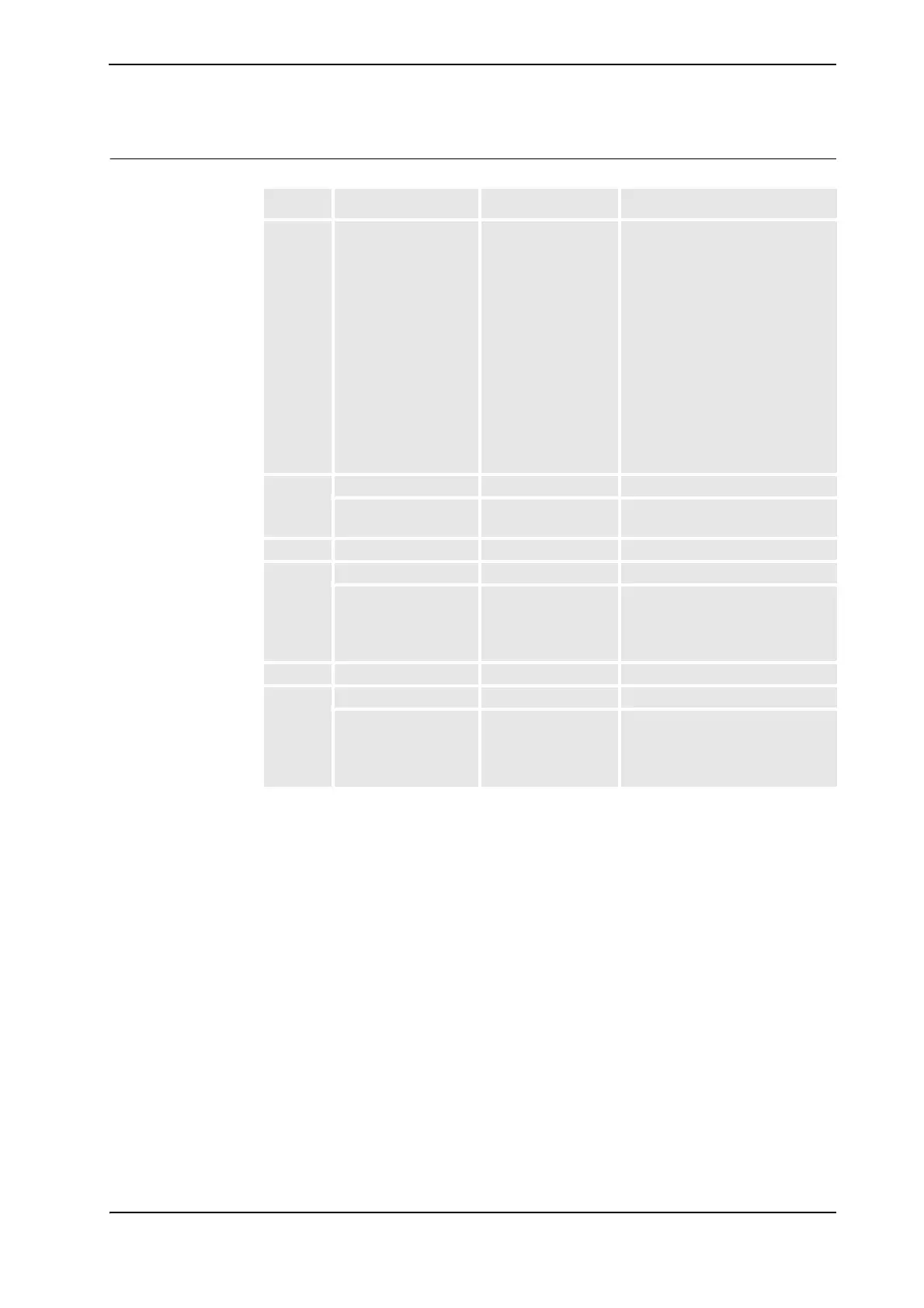
Working ranges
Axis IRB 1600 - x/1.2 IRB 1600- x/1.45 Note
Axis 1 +180º to -180º +180º to -180º Axis 1 working range has the
following limitations:
• ±45º when tilting the robot
up to 30º.
• ±20º for a wall mounted
IRB 1600-5/1.2
IRB 1600-6/1.2
IRB 1600-7/1.2
IRB 1600-5/1.45
IRB 1600-6/1.45
IRB 1600-7/1.45
• ±45º for a wall mounted
IRB 1600-8/1.2
IRB 1600-8/1.45
Axis 2 +110º to -63º +120º to -90º
+136º to -63º (with
axis 1 limited to ±100º)
+150º to -90º (with
axis 1 limited to ±95º)
Axis 3 +55º to -235º +65º to -245º
Axis 4 +200º to -200º +200º to -200º Default value
+190 to -190
revolutions
+190 to -190
revolutions
Maximum value.
The default working range for axis
4 can be extended by changing
parameter values in the software.
Axis 5 +115º to -115º +115º to -115º
Axis 6 +400º to -400º +400º to -400º Default
+288 to -288
revolutions
+288 to -288
revolutions
Maximum value.
The default working range for axis
6 can be extended by changing
parameter values in the software.
Continued
Continues on next page
 Loading...
Loading...






