Action
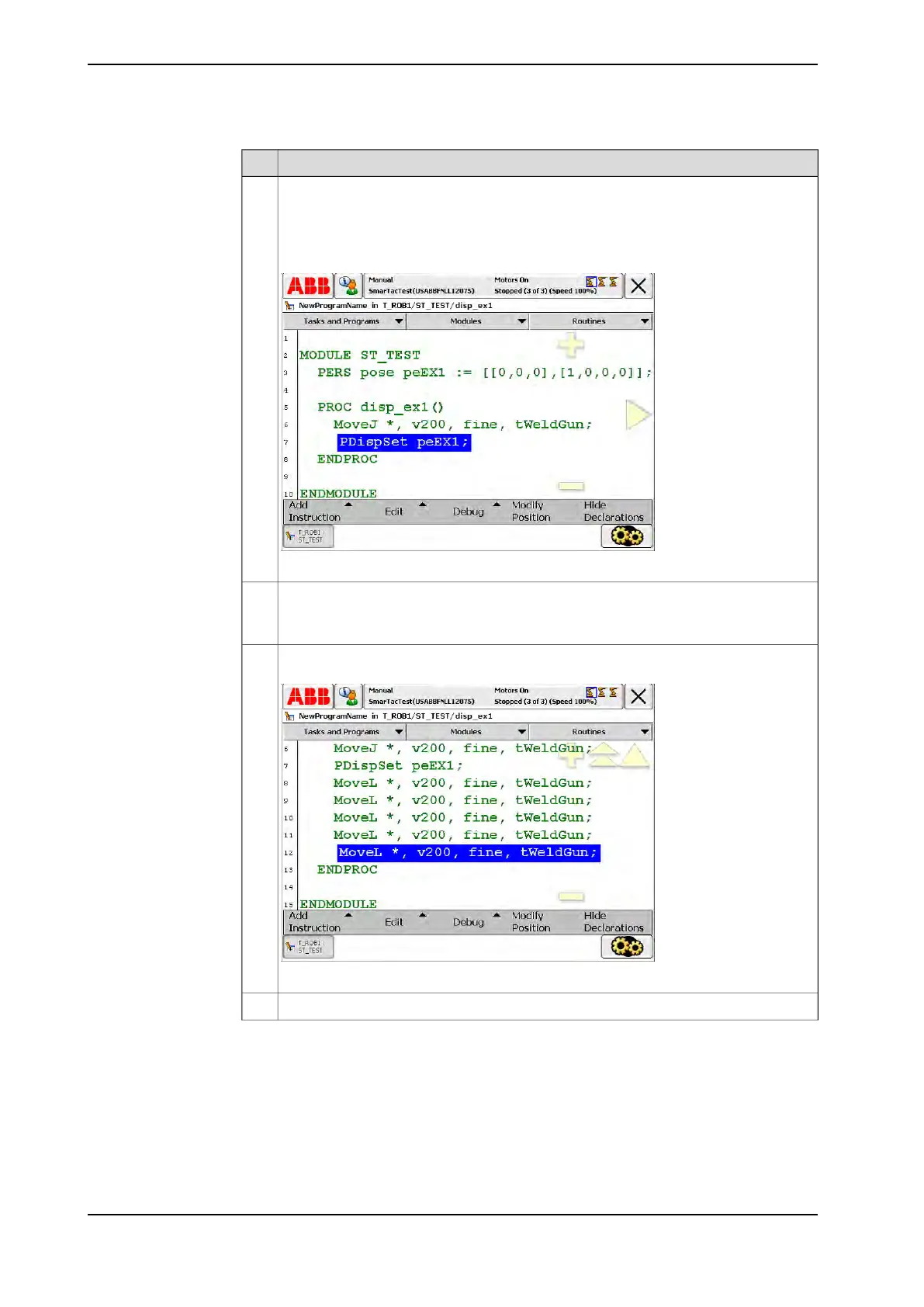
Insert the instruction PDispSet.7
This is a RAPID command that will be found on one of the standard instruction pick-
lists. Here, you will see that we used a custom most common pick-list.
The PDispSet instruction requires one argument: a displacement frame. When
prompted for this data, select new and create a new pose data type called peEX1.
xx1400001481
Jog the robot down to the rectangle so that the tip is just above one of the rectangle
corners.
8
Create a MoveL at this position using tWeldGun and no work object selected.
Do the same for the rest of the corners, returning to the first corner, so that you have
a short program that traces out the rectangle.
xx1400001482
9
Insert the instruction PDispOff.10
Continues on next page
36 Application manual - SmarTac
3HAC024845-001 Revision: A
© Copyright 2004-2016 ABB. All rights reserved.
4 User's guide
4.3 Exercise 1: program displacement
Continued