Action
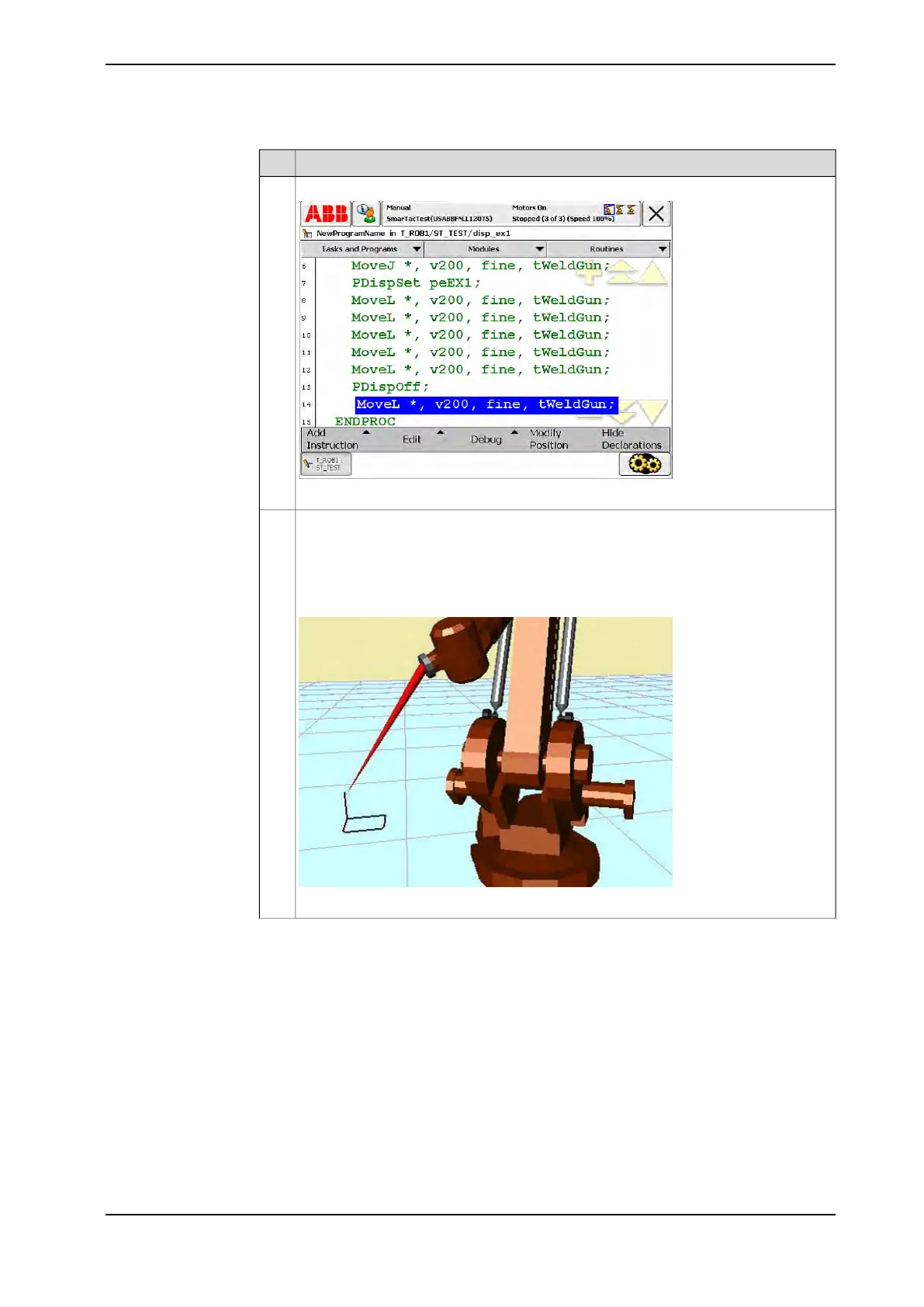
Jog the robot away from the rectangle a few inches and insert a final MoveL.
xx1400001483
11
Execute this routine from the beginning in manual mode to be sure the program
works correctly.
12
This routine executes a simple movement path. Each of the robtargets in the MoveL
instructions is related to the world frame. In this case, however, the work object has
not been specified, so wobj0 is used by default. This work object is the same as the
world frame.
xx1400001484
Continues on next page
Application manual - SmarTac 37
3HAC024845-001 Revision: A
© Copyright 2004-2016 ABB. All rights reserved.
4 User's guide
4.3 Exercise 1: program displacement
Continued