Action
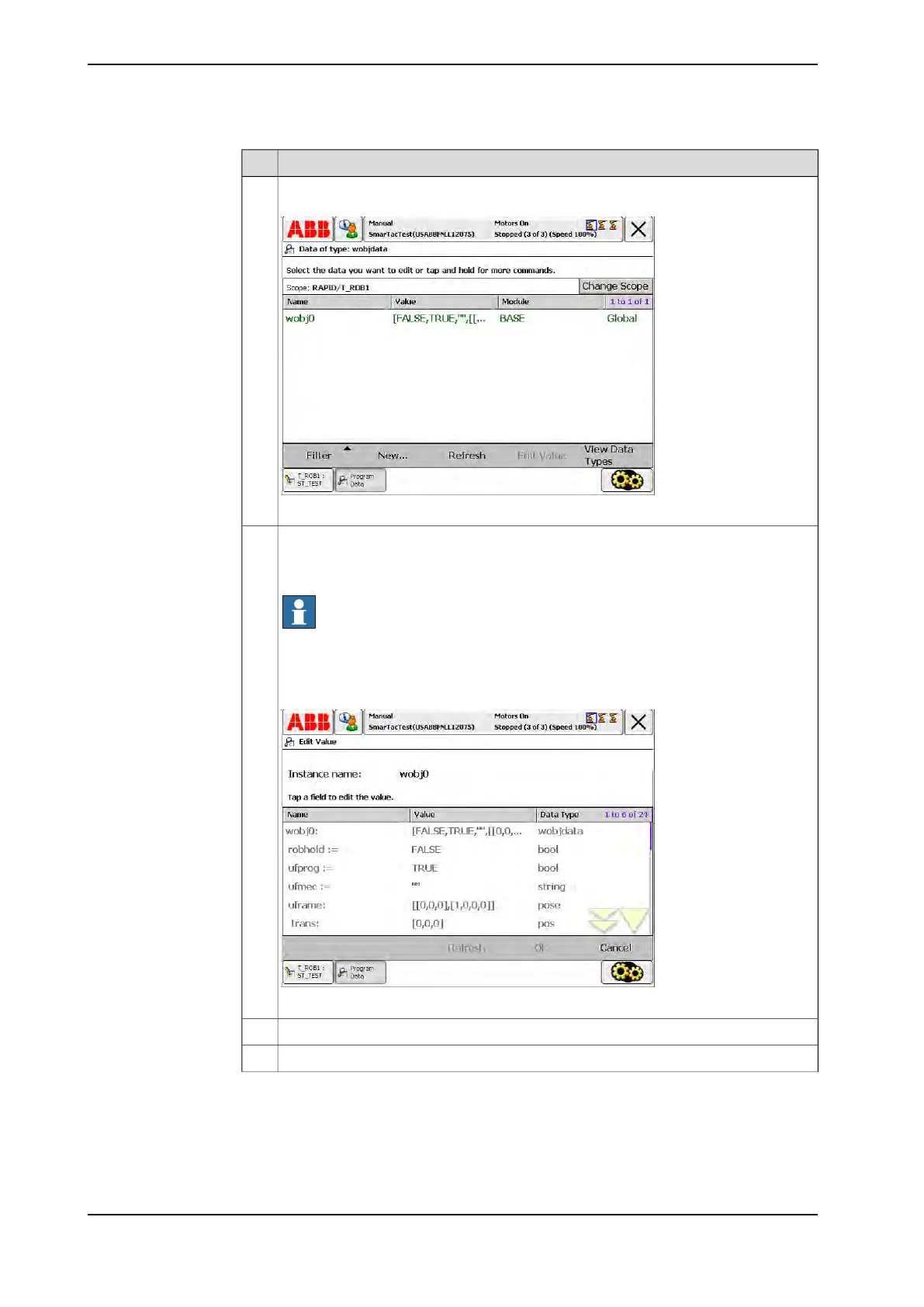
Open the Program Data window and take a look at the values in wobj0. Then tap to
select wobjdata.
xx1400001485
13
Tap and hold wobj0. The following will be visible:14
Cursor down and look at the data that is present. The only other frame that can change
the robtarget positions in our rectangle routine, is the displacement frame.
Note
A work object has two frames, the user frame, uframe, and the object frame, oframe.
Also note that the values are all zero for the locations, and ones and zeros for the
orientations. That is why the work object has no affect on our program. It is the same
as the World frame.
xx1400001486
Tap Cancel to close the work object window. Then select View Data Types.15
Select pose data types.16
Continues on next page
38 Application manual - SmarTac
3HAC024845-001 Revision: A
© Copyright 2004-2016 ABB. All rights reserved.
4 User's guide
4.3 Exercise 1: program displacement
Continued