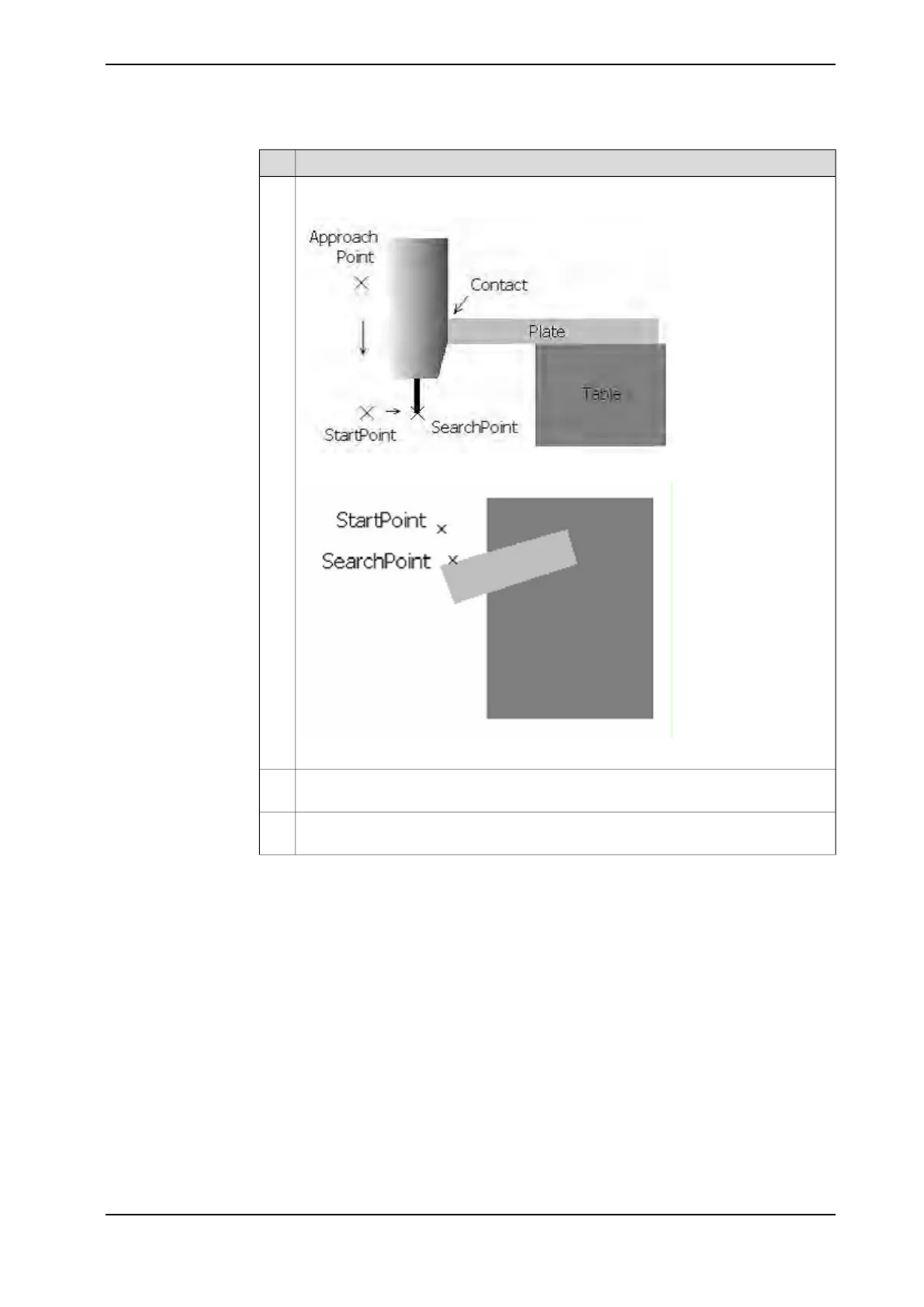
Action
Jog the robot to the StartPoint and modify the position of the first robtarget in
the Search_1D instruction.
xx1400001498
15
xx1400001499
Toggle the Program Window to the test mode and move the program pointer to the
Search_1D instruction.
16
Press the enabling device and press the forward button. The robot should move to
the StartPoint, then search towards the SearchPoint, until the plate is detected.
17
Continues on next page
Application manual - SmarTac 45
3HAC024845-001 Revision: A
© Copyright 2004-2016 ABB. All rights reserved.
4 User's guide
4.4.2 Exercise 2: one-dimensional search
Continued