Wiring method
1. If you don't know how to connect the camera, you can refer to the official
documentation of the Raspberry Pi camera.
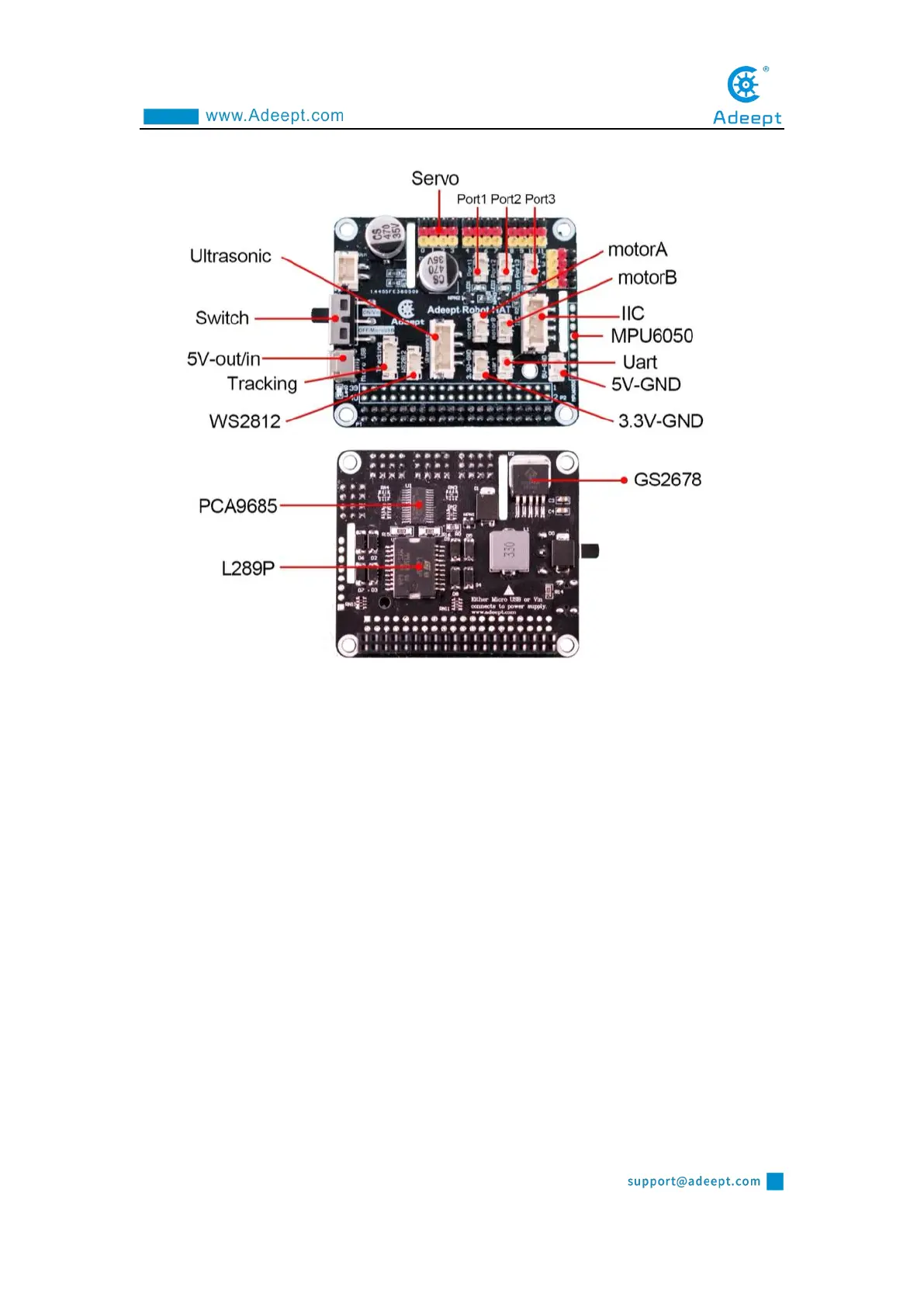
2. The motor on the left is connected to the MOTOR-B port; the motor on the right is
connected to the MOTOR-A port.
3. The bottom servo that controls the left and right steering of the PiCarPro car is
connected to the port0 servo port of the drive board.
4. Control the servo that swings the PTZ assembly to the left and right, and connect to
the Port 1 servo port of the drive board.
5. The servo that controls the robotic arm or ultrasonic swing up and down on the
PTZ is connected to the Port 2 servo port.
6. The servo that controls the up and down movement of the chuck is connected to the