duration of the high level is the time from emission to return of the ultrasonic wave.
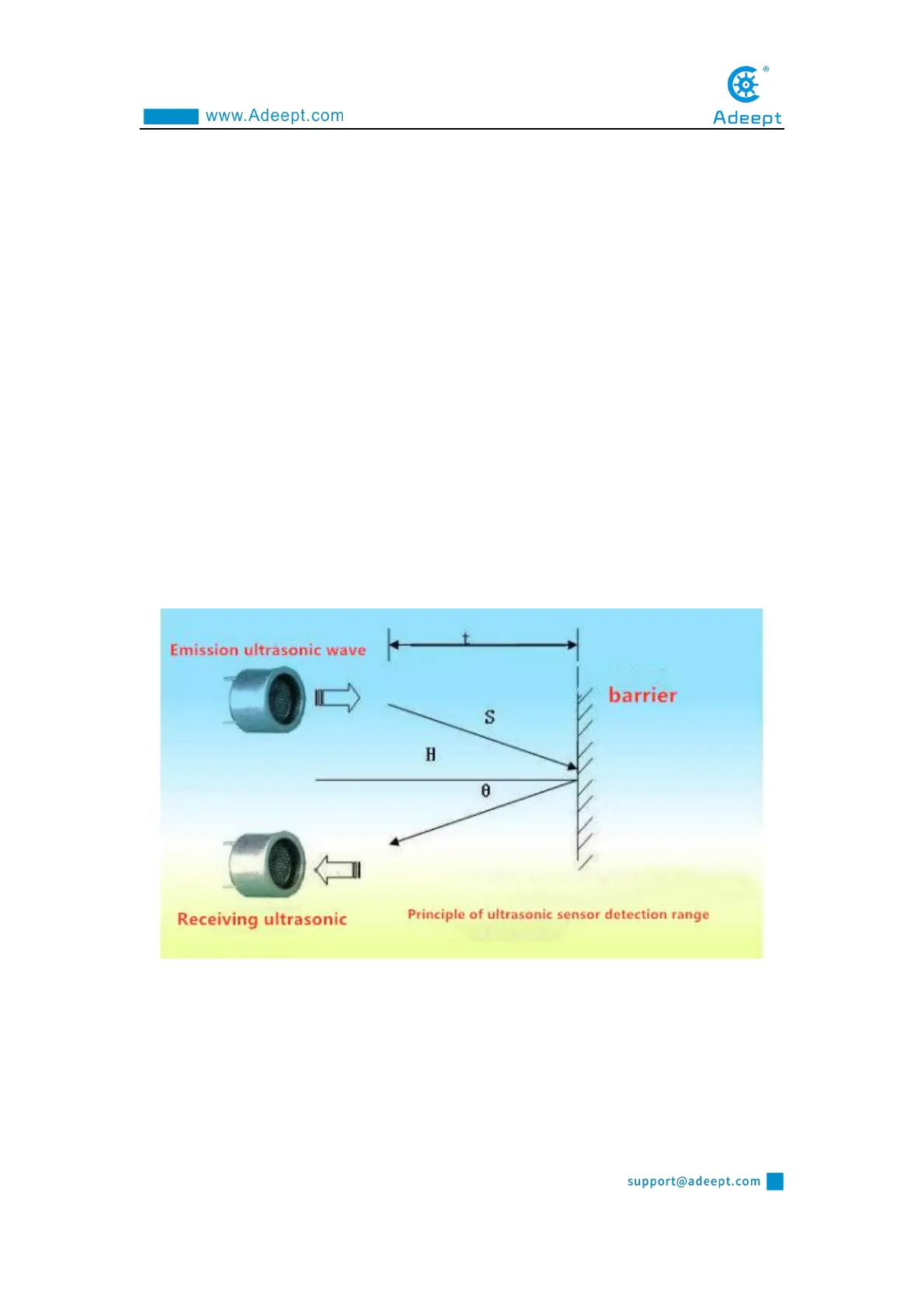
The principle of distance detection by ultrasonic ranging sensor: the method of
detecting distance by ultrasonic is called echo detection method, that is, the ultrasonic
transmitter emits ultrasonic waves in a certain direction, and the timer starts timing at
the same time as the launch time. The ultrasonic waves propagate in the air and
encounter obstacles on the way. When the object surface (object) is blocked, it will be
reflected back immediately, and the ultrasonic receiver will immediately stop timing
when the reflected ultrasonic wave is received. The propagation speed of ultrasonic
waves in the air is 340m/s. According to the time t recorded by the timer, the distance
s from the launch point to the obstacle surface can be calculated, namely: s=340t/2.
Using this principle of ultrasound, the ultrasonic ranging module is widely used in
practical applications, such as car reversing radar, unmanned aerial vehicle, and smart
car.
When using Robot HAT driver board, the ultrasonic sensor needs to be connected
to the Ultrasonic interface on the driver board, and must not be connected to the IIC
port to avoid burning the ultrasonic module. (IIC is an interface used to connect I2C
devices, and the pin positions of VCC and GND are different from Ultrasonic).