Rockwell Automation Publication 750-PM001N-EN-P - February 2017 171
Drive Port 0 Parameters Chapter 3
Drive (Port 0) Applications
File
File
Group
No. Display Name
Full Name
Description
Values
Read-Write
Data Type
APPLICATIONS
Process PID
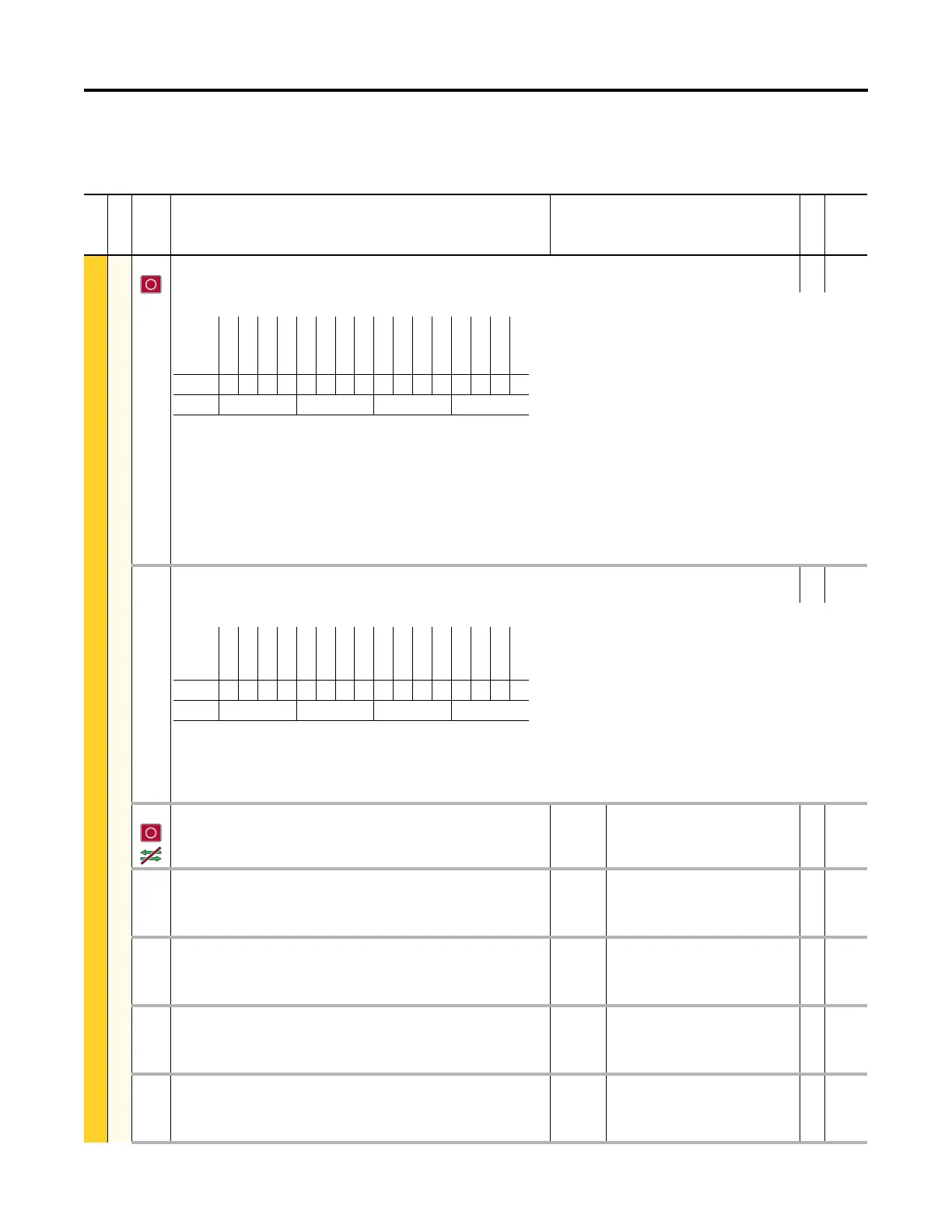
1065 PID Cfg
PID Configuration
RW 16-bit
Integer
Main configuration of the Process PID controller.
Bit 0 “Preload Int” – Preload the PID integral term with PID Preload value.
Bit 1 “Ramp Ref” – Ramp PID Reference when first enabled.
Bit 2 “Zero Clamp” – Clamp PID output to zero when P1079 [PID Output Sel] is set to option 2 “Speed Trim” or 4 “Torque Trim.”
Bit 3 “Fdbk Sqrt” – Apply Square root function to the Feedback signal.
Bit 4 “Stop Mode” – When P1079 [PID Output Sel] is set to option 2 “Speed Trim,” PID remains active during stopping maneuver.
Bit 5 “Anti Windup” – Prevents PID integrator from getting too far ahead of frequency ramp.
Bit 6 “Percent Ref” – When P1079 [PID Output Sel] is set to option 2 “Speed Trim,” PID output is a percentage of the Speed Reference versus a percentage of P27
[Motor NP Hertz].
1066 PID Control
PID Control
RW 16-bit
Integer
Used for dynamically controlling the Process PID controller.
Bit 0 “PID Enable” – PID controller is enabled.
Bit 1 “PID Hold” – Hold PID integrator.
Bit 2 “PID Reset” – Reset PID integrator.
Bit 3 “PID InvError” – Invert PID error.
1067 PID Ref Sel
PID Reference Select
Selects the source for the PID reference.
Default:
Min/Max:
1070
1 / 159999
RW 32-bit
Integer
1068 PID Ref AnlgHi
PID Reference Analog High
When an analog input is selected for the PID reference this sets the high value of scaling.
A value of 100% is equal to motor base speed.
Units:
Default:
Min/Max:
%
100.00
–/+100.00
RW Real
1069 PID Ref AnlgLo
PID Reference Analog Low
When an analog input is selected for PID reference this sets the low value of scaling. A
value of 100% is equal to motor base speed.
Units:
Default:
Min/Max:
%
0.00
–/+100.00
RW Real
1070 PID Setpoint
PID Setpoint
Provides an internal fixed value for PID reference when P1067 [PID Ref Sel] is set to this
parameter. A value of 100% is equal to motor base speed.
Units:
Default:
Min/Max:
%
0.00
–/+100.00
RW Real
1071 PID Ref Mult
PID Reference Multiplier
Sets the multiplying factor which is applied to the Reference source before the
Reference is used. A value of 100% is equal to motor base speed.
Units:
Default:
Min/Max:
%
100.00
–/+100.00
RW Real
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Percent Ref
Anti Windup
Stop Mode
Fdbk Sqrt
Zero Clamp
Ramp Ref
Preload Int
Default0000000000000000
Bit 1514131211109876543210
0 = Disabled
1 = Enabled
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
PID InvError
PID Reset
PID Hold
PID Enable
Default0000000000000000
Bit 1514131211109876543210
0 = Condition False
1 = Condition True
 Loading...
Loading...







