2-148 Process PI Loop
Positive and Negative Limits
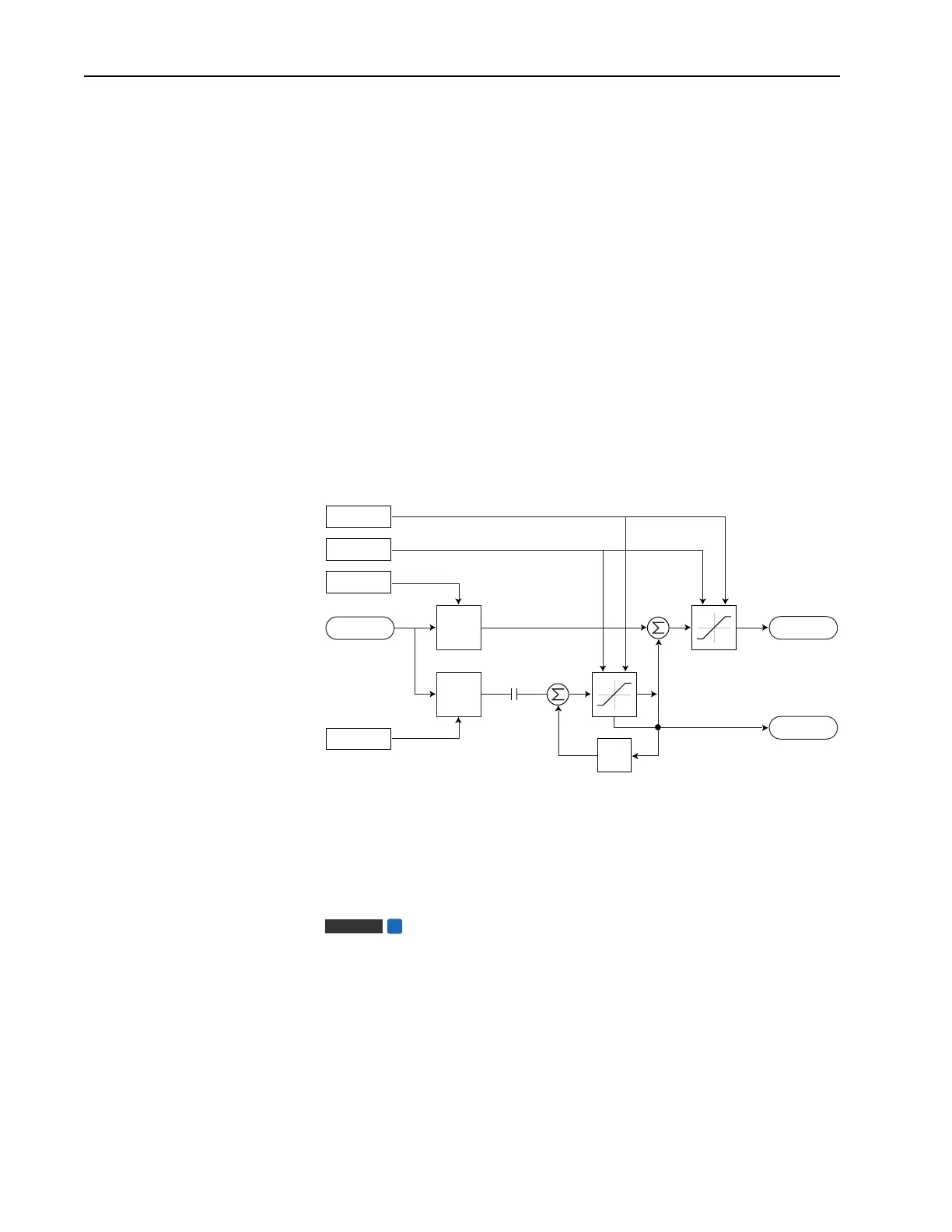
The PI has parameters to define the positive and negative limits of the
output PI Positive Limit, and PI Negative Limit. The limits are used in two
places; on the integrator and on the sum of the Kp + Ki terms.
Providing an external source doesn't turn on Hold, the integrator is allowed
to integrate all the way to Positive or Negative limit. If the integrator reaches
the limit the value is clamped and the InLimit bit is set in the PI Status
parameter to indicate this condition.
The limits are entered in the range of ±100.00.
PI Positive Limit must always be greater than PI Negative Limit.
If the application is Process Control, typically these limits would be set to
the maximum allowable frequency setting. This allows the PI regulator to
control over the entire required speed range.
If the application is Process Trim, large trim corrections may not be
desirable and the limits would be programmed for smaller values.
Output Scaling
The output value produced by the PI is displayed as ±100.00. Internally this
is represented by ±32767 which corresponds to ±maximum frequency.
Output Scaling for Torque Trim
The output value from the Process PI loop, when in torque trim mode, is
displayed as +/–100% which corresponds to +/–100% of rated motor
torque.
PI NegLmt
PI Kp
PI Ki
+
+
+
+
In Limit
PI PosLmt
*
*
PI_Status
.Hold
PI Error
Z
-1
PI Output
Vector
FV
 Loading...
Loading...









