Speed/Torque Select 2-179
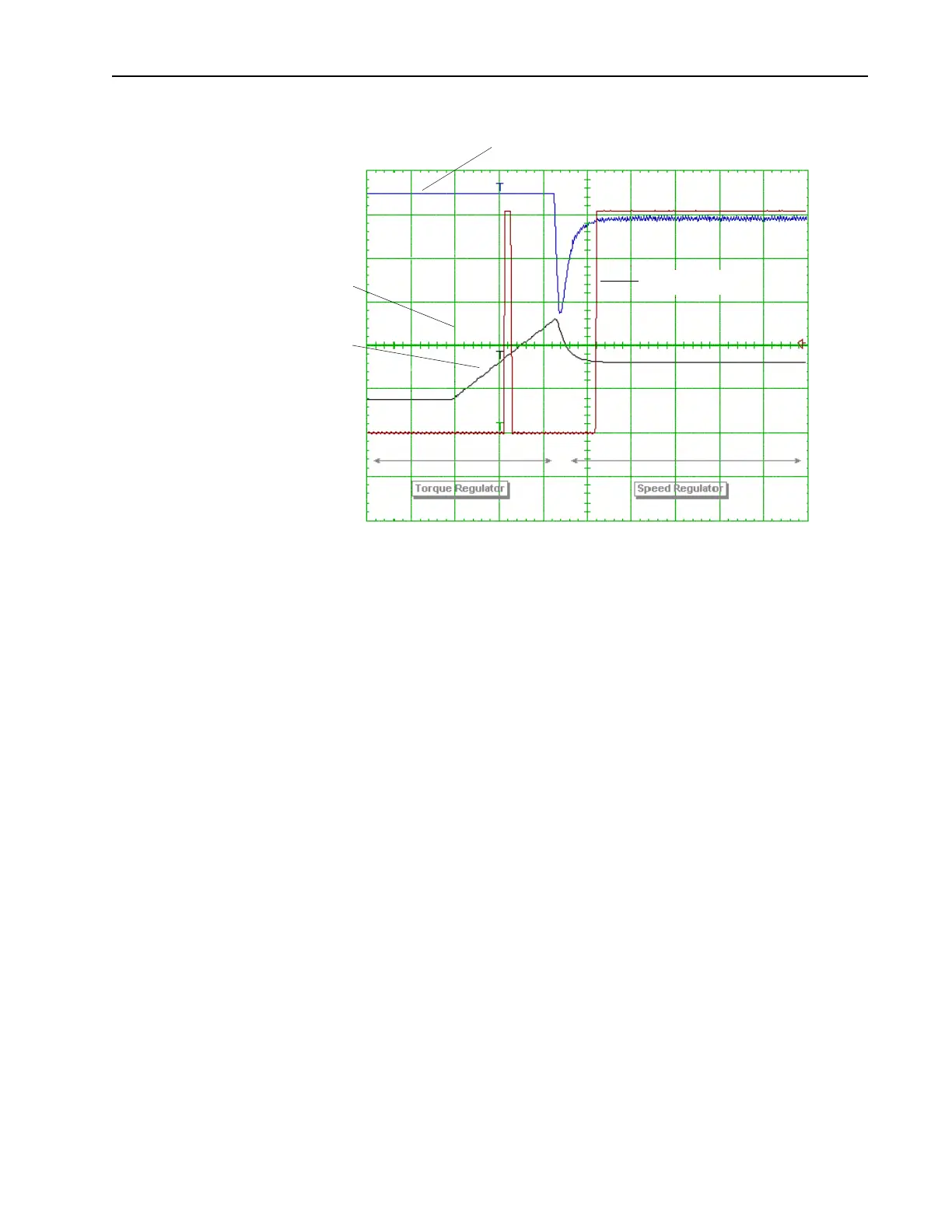
Figure 2.38
Sum Mode
Configuring the drive in this mode allows an external torque input to be
summed with the torque command generated by the speed regulator. The
drive requires both a speed reference and a torque reference to be linked.
This mode can be used for applications that have precise speed changes
with critical time constraints. If the torque requirement and timing is known
for a given speed change, then the external torque input can be used to
preload the integrator. The timing of the speed change and the application of
an external torque command change must be coordinated for this mode to
be useful. The sum mode will then work as a feed forward to the torque
regulator.
Zero Torque Mode
Operation in zero torque mode allows the motor to be fully fluxed and ready
to rotate when a speed command or torque command is given. For a cyclical
application where through put is a high priority this mode can be used. The
control logic can select zero torque during the “rest” portion of a machine
cycle instead of stopping the drive. When the cycle start occurs, instead of
issuing a start to the drive, a speed regulate mode can be selected. The drive
will then immediately accelerate the motor without the need for “flux up”
time.
Important: Zero Torque may excessively heat the motor if operated in this
mode for extended periods of time. No load or flux current is
still present when the drive is operating in zero torque mode. A
motor with an extended speed range or separate cooling
methods (blower) may be required.
Internal Torque Command
Load Step (Decrease)
Speed Feedback
308
RPM
At Speed Relay

 Loading...
Loading...








