Preliminary Technical
Data
Rev. PrA | Page 12 of 82
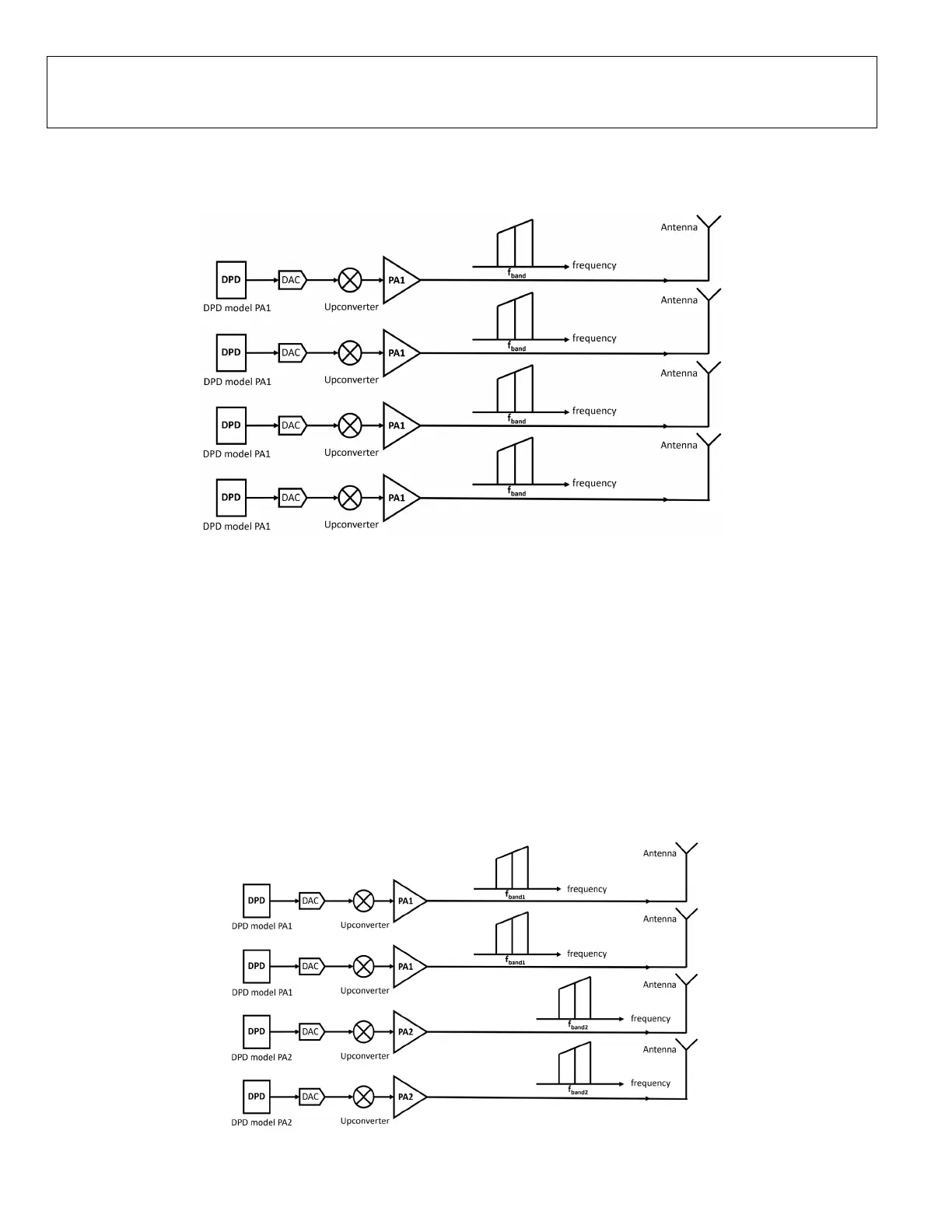
Single Frequency Band Use Case
In the single frequency band use case, all four transmit channels are working in the same frequency band as shown in Figure 14.
Note the PA model will be the same for all four channels.
Figure 14. Single Frequency Band Use Case Configuration
The API sequence for programming DPD models in a single frequency band use case is shown below. The factory calibrated
coefficients can be programmed into the transceiver using the API adi_adrv9025_DpdModelConfigSet as described in the
previous section. The DPD reset with the LUT restore option must be exercised consecutively on all four channels to program the
coefficients into the DPD actuator hardware.
adi_adrv9025_DpdModelConfigSet()
adi_adrv9025_DpdReset(ADI_ADRV9025_TX1, ADI_ADRV9025_DPD_LUT_RESTORE)
adi_adrv9025_DpdReset(ADI_ADRV9025_TX2, ADI_ADRV9025_DPD_LUT_RESTORE)
adi_adrv9025_DpdReset(ADI_ADRV9025_TX3, ADI_ADRV9025_DPD_LUT_RESTORE)
adi_drv9025_DpdReset(ADI_ADRV9025_TX4, ADI_ADRV9025_DPD_LUT_RESTORE)
Dual Frequency Band Use Case
In the dual frequency band use case, the signals of transmit channels 1 and 2 are centered at f
band1
and those of transmit channels
3 and 4 at f
band2.
PA characteristics are band dependent, so the DPD model that is loaded into transmit channels 1 and 2 must be
different than the model loaded into transmit channels 3 and 4 as shown in Figure 15.
 Loading...
Loading...
