Preliminary Technical
Data
Rev. PrA | Page 47 of 82
Table 16. Adi_adrv9025_CfrCtrlConfig_t Data Structure
Data Type Structure Member
Description
uint32_t txChannelMask 0..15
Mask consisting of 'OR'ed transmitter channels for which
the CFR core config will be applied (1 bit for each
adi_adrv9010_CfrMod
eSel_e
cfrMode 1
Selects the mode in which CFR is required to operate in.
Currently, Mode 1 is the only supported mode.
uint16_t cfrTxDelay 129..511
Sets CFR delay per engine in units of samples at the CFR
input rate (JESD 204B/C transmitter rate)
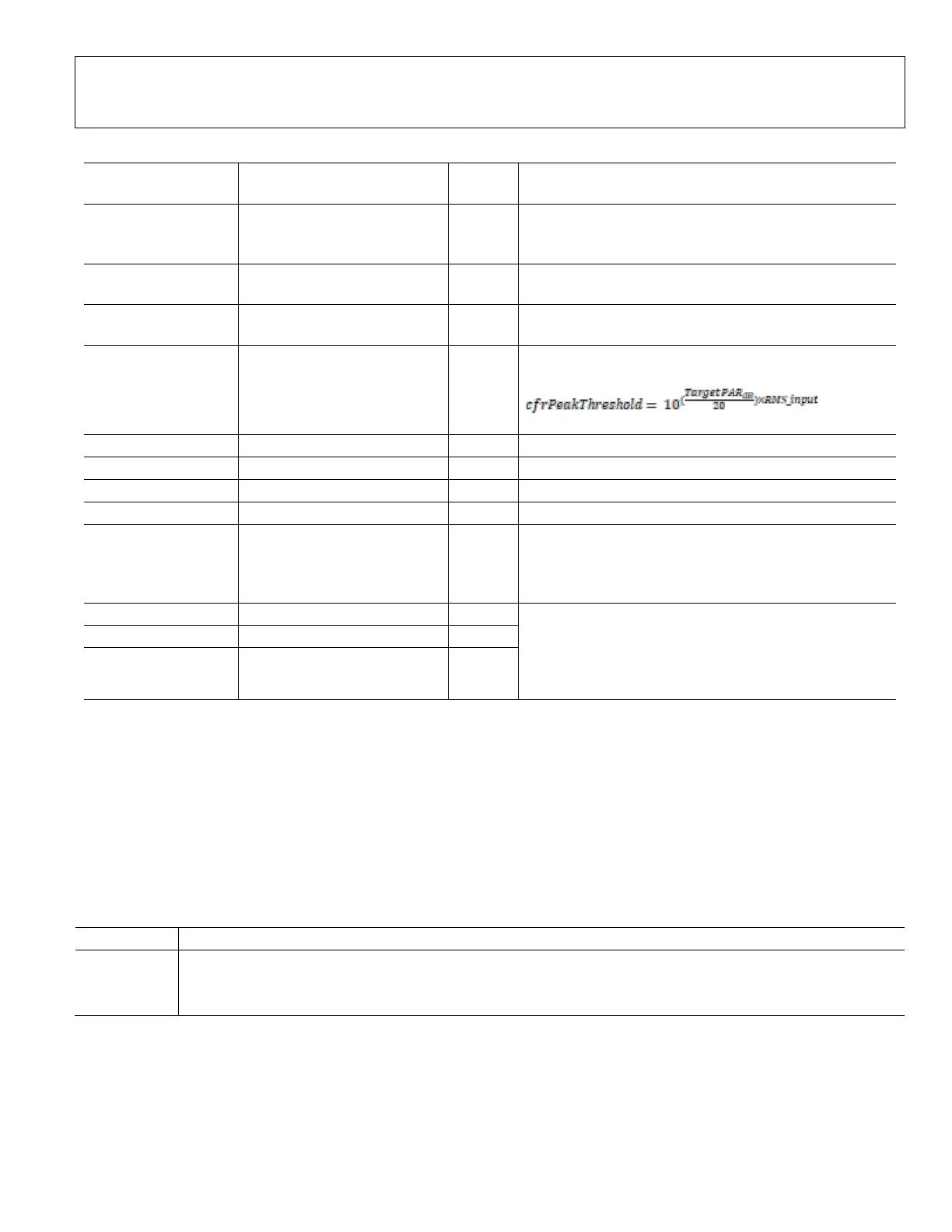
float cfrPeakThreshold 0..1
Sets the target CFR peak detection and correction
threshold. The threshold is calculated as:
The peak threshold is set to 0.79 by default.
cfrEngine1PeakThresholdScaler
Threshold Scaler for engine CFR engine 3
cfrEngine2PeakThresholdScaler
Threshold Scaler for engine CFR engine 2
cfrEngine3PeakThresholdScaler
Threshold Scaler for engine CFR engine 1
cfrCorrectionThresholdScaler
Threshold Scaler for CFR correction
adi_adrv9010_CfrInter
polationSel_e
cfrInterpolationFactor 1, 2, 4
Selects the interpolation factor to be applied to CFR input
before peak detection. The CFR peak detectors can run at
a higher (interpolated) rate to enable better peak
Sets the maximum number of peaks to remove in one
group for the respective CFR engines. Default value is 5.
User needs to set this to 0 when engine is disabled. It's
suggested to have descending order of max number of
peaks where Engine1 has the highest value.
uint8_t cfrEngine3MaxNumOfPeaks 0..5
adi_adrv9025_CfrCtrlConfigGet(…)
int32_t adi_adrv9025_CfrCtrlConfigGet(adi_adrv9025_Device_t * device, adi_adrv9025_TxChannels_e
txChannel, adi_adrv9025_CfrCtrlConfig_t * cfrCtrlConfig)
Description
This function retrieves the core control config parameters for the CFR engine. It reads the CFR mode, peak threshold,
interpolation factor and the delay currently programmed into the device.
Precondition
This function may be called after device initialization and the ARM processor boot up is complete.
Table 17. adi_adrv9025_ CfrCtrlConfigGet(…) Parameters
Pointer to the device settings structure
Target transmitter channel whose CFR control config is required to be read back
Pointer to CFR control config struct which will be updated with the CFR control settings from the device
adi_adrv9025_CfrCorrectionPulseWrite_v2(…)
int32_t adi_adrv9025_CfrCorrectionPulseWrite_v2(adi_adrv9025_Device_t * device, uint32_t
txChannelMask, adi_adrv9025_CfrCorrectionPulse_t cfrCorrectionPulses[], uint8_t
numCorrectionPulses);
Description
 Loading...
Loading...
