Preliminary Technical
Data
Rev. PrA | Page 8 of 82
The mathematical representation of the DPD coefficient estimation is shown in Figure 9. The DPD engine observes N samples of
PA input samples (X) and PA output samples (Y), and computes M-coefficients (c) corresponding to the inverse PA function F(x).
y1
y2
y3
y4
.
.
.
yN
=
f1(x1) f2(x1) f3(x1) f4(x1) ….. fM(x1)
f1(x2) f2(x2) f3(x2) f4(x2) ….. fM(x2)
f1(x3) f2(x3) f3(x3) f4(x3) ….. fM(x3)
f1(x4) f2(x4) f3(x4) f4(x4) ….. fM(x4)
.
.
.
f1(xN) f2(xN) f3(xN) f4(xN) ….. fM(xN)
c1
c2
c3
c4
.
.
.
cM
Y
F(x) c
Figure 9. DPD Indirect Learning Coefficient Computation
The coefficient set (c) is estimated through a least squares approximation as described in matrix multiplication equations (1) to
(3).
Y = F x C
F
H
Y = (F
H
F)C
(F
H
F)
-1
(F
H
Y) = C
Auto-
correlation
Cross-
correlation
(1)
(2)
(3)
Multiply by complex conjugate of F on both sides
Take the inverse of the auto-correlation function to
obtain C
DPD Direct Learning
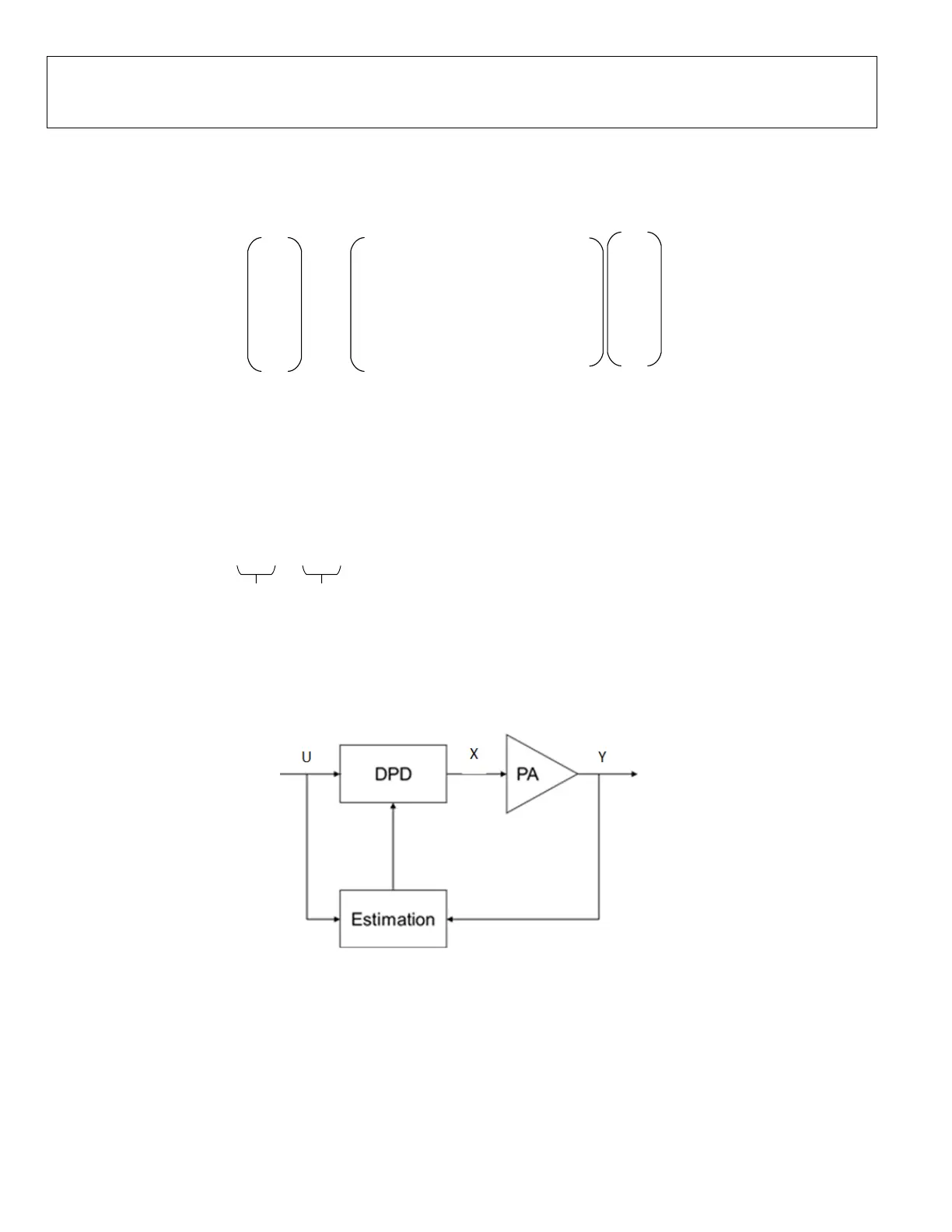
DPD direct learning involves using the pre-DPD actuator Tx signal (U) as reference to minimize the error between the observed
(Y) and reference data (U).
Figure 10. DPD Direct Learning Architecture
The mathematical representation of the DPD coefficient estimation via direct learning is described as follows. An error E is
defined as the difference between observed (Y) and pre-DPD actuator data (U).
E = Y – U
The PA is modeled as the function Fx multiplied by adaptive coefficients C through the error matrix E as shown in Figure 11.
 Loading...
Loading...
