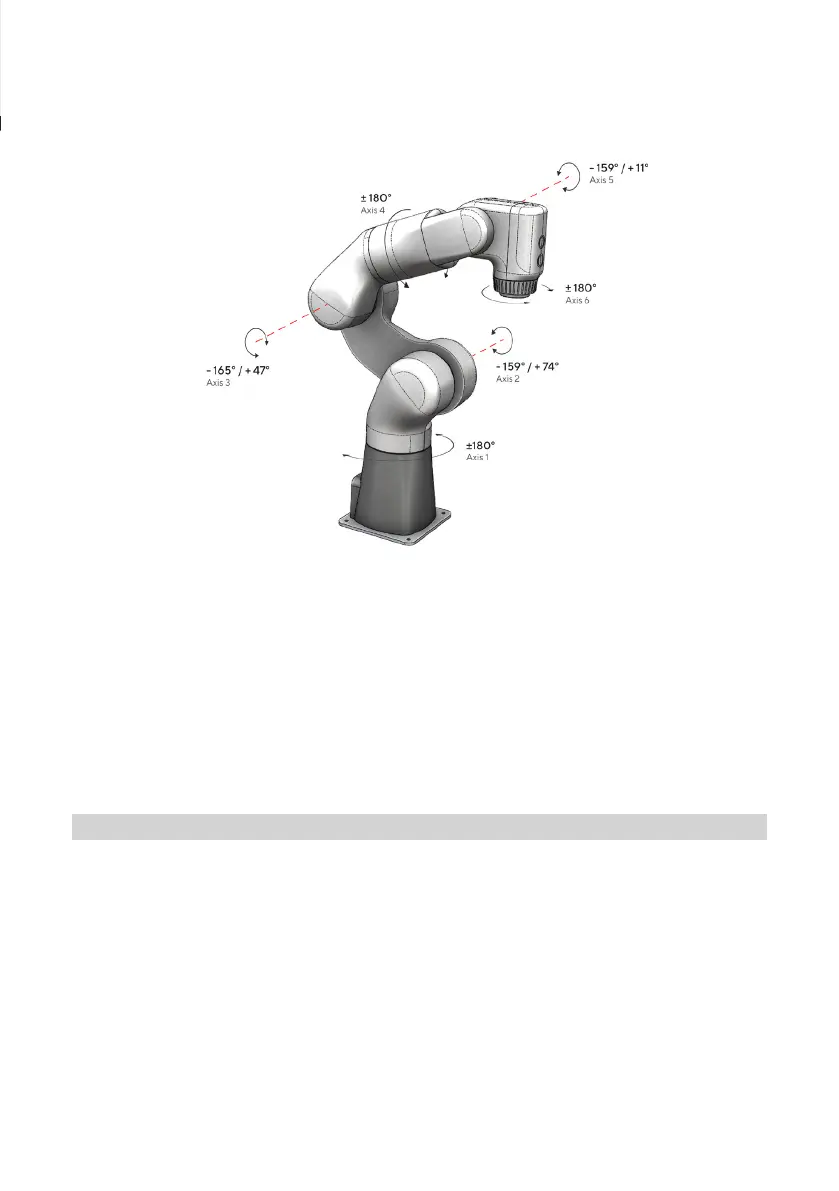
Eva achieves movement and maintains its position with six revolute joints:
Each axis has its own mechanical brakes. These are engaged by default, and
disengaged when the robot is instructed to move.
A manual brake release is present in axes 2, 3 and 5. Consult the safety manual
to learn how to carry out this procedure.
Ratings and Limitations
Eva should always be installed upright to ensure appropriate performance.
Due to its six axes, the robot has six degrees of freedom; this allows it to travel
through x, y, and z axes as well as turning around each axis.
The robot weighs 9.5 kg, has a repeatability of ±0.5 mm, a maximum payload
of 1.25 kg and a reach of 600 mm. The joints have a maximum velocity of 120°
per second, which allows the head of the robot to move up to 750 mm per sec-
ond. The maximum speed for desktop operations is 250 mm per second, as per
ISO 10218. Consult the safety manual for information on setting an appropriate
speed for your application.
27