DataMan Control Commands
Mirror paths and positions are manually programmed on the device through the use of DataMan Control Commands
(DMCC) via Telnet or Serial interface. For more information on DMCC communications, please refer to the DataMan
Communications and Programming Guide.
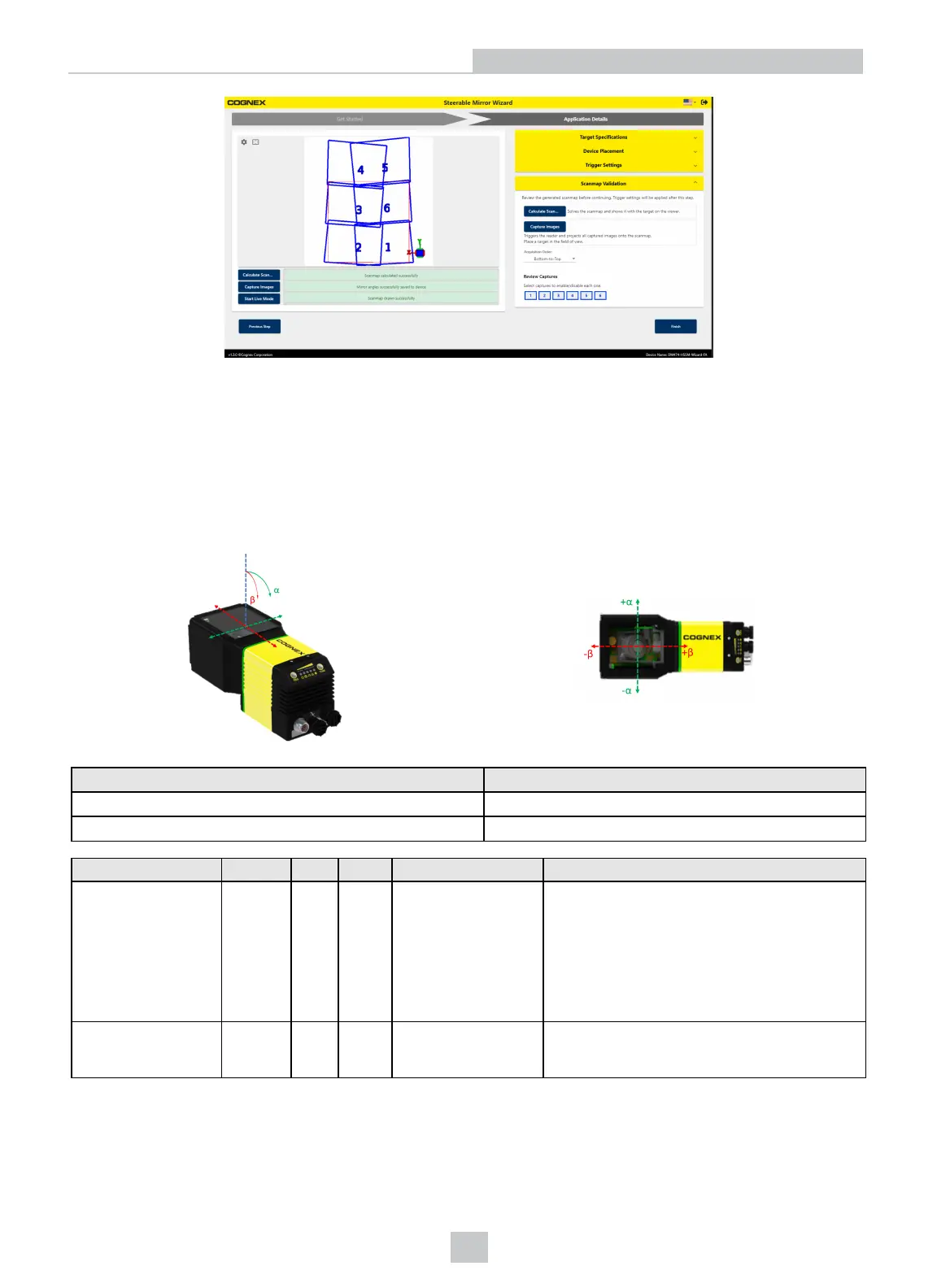
All DMCC commands related to the high speed steerable mirror use the following internal coordinate system, where α is
used to denote motion along the vertical axis, and β is used to denote motion along the horizontal axis.
Configuration Angle Limitations
1-Axis Scan Pattern 0°α, ±25°β
2-Axis Scan Pattern ±17°α, ±17°β
Name Set/Get Args Range Meaning Description
MIRROR.PATH SET|GET string
data
[0-
512]
<number_of_
positions>:
<α0>,< β0>;
< α1>,<β1>;..."
Example:
SET MIRROR.PATH
2:10.5,10.5;10.5,10.5
;
Maximum of 64 positions with the precision of
0.001°.
Sets/gets the mirror path sequence followed
during triggering.
Specify each value in a floating point format.
(For example, 10° as 10.0.)
MIRROR.CURRENT-
INDEX
SET|GET uint8
index
[0-63] SET MIRROR.
CURRENT-INDEX 0
Gets/sets the current mirror position. GET
immediately moves the mirror to the desired
position
17
Using Your High Speed Steerable Mirror