Safety
Information
Product
Information
Mechanical
Installation
Electrical
Installation
Getting
Started
Menu 0
Running
the motor
Optimisation Macros
Advanced
Parameters
Technical
Data
Diagnostics
UL Listing
Information
72 Unidrive User Guide
www.controltechniques.com Issue Number: 9
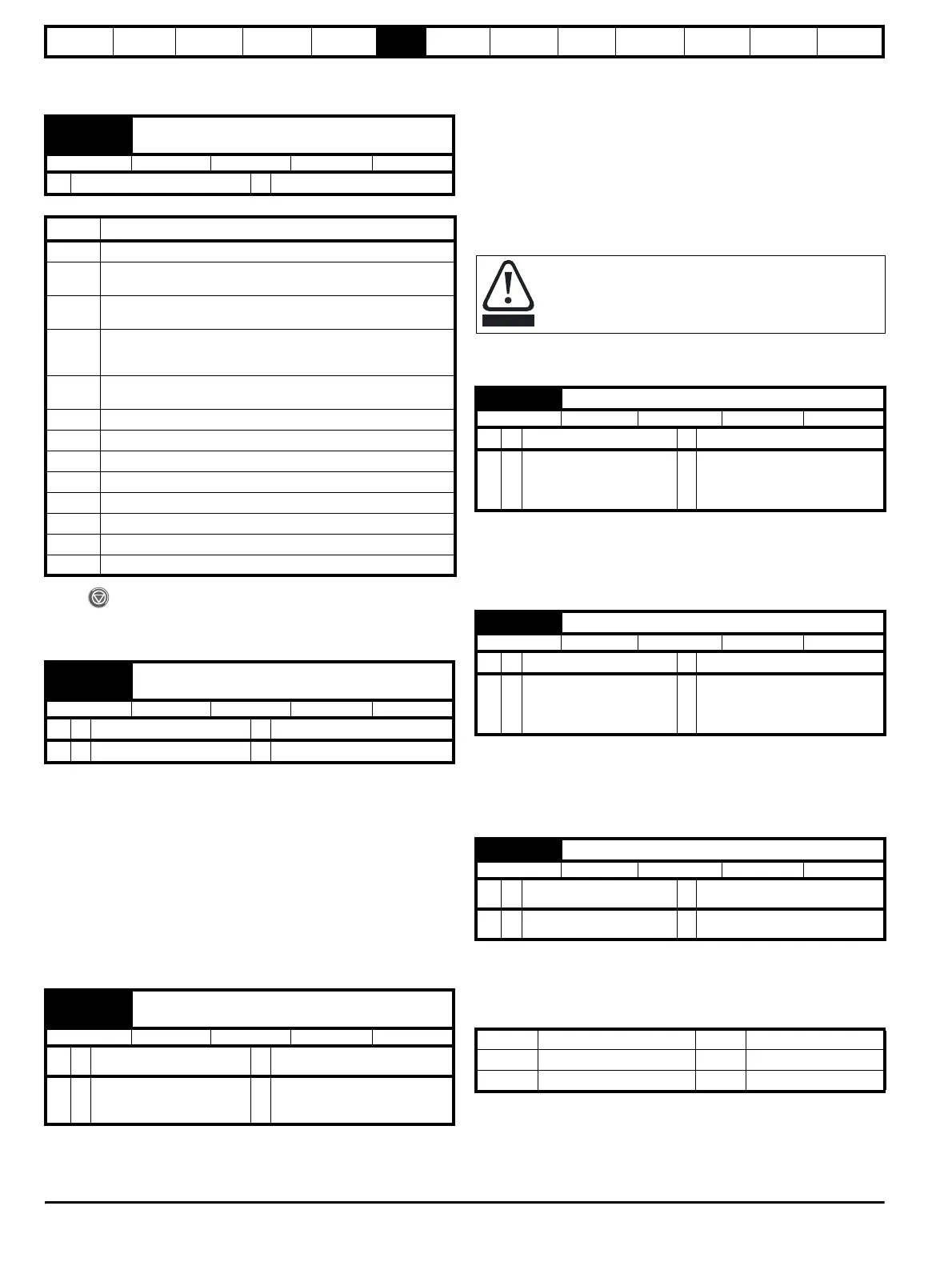
6.2 Menu 0 full descriptions
6.2.1 Menu 0 configuration
Press after setting Pr 0.00 at the required value.
6.2.2 Speed limits
(When the drive is jogging, [Pr 0.01] has no effect.)
Open-loop
Set 0.01 at the required minimum output frequency of the drive for both
directions of rotation. The drive runs at the minimum frequency when the
frequency reference is zero.
[Pr 0.01] is a nominal value; slip compensation may cause the actual
frequency to be higher.
Closed-loop
Set Pr 0.01 at the required minimum motor speed for both directions of
rotation. The motor runs at the minimum speed when the speed
reference is zero.
* This parameter has a maximum range of 250Hz in Unidrive VTC.
(The drive has additional over-speed protection.)
Open-loop
Set Pr 0.02 at the required maximum output frequency for both
directions of rotation. The frequency reference cannot cause the drive to
run at a frequency higher than [Pr 0.02].
[Pr 0.02] is a nominal value; slip compensation may cause the actual
frequency to be higher.
Closed-loop
Set Pr 0.02 at the required maximum motor speed for both directions of
rotation. The speed reference cannot cause the drive to run the motor at
a speed higher than [Pr 0.02].
6.2.3 Ramps, Speed reference selection, Current
limit
*This parameter has a default setting of 60s in Unidrive VTC.
Set Pr 0.03 at the required rate of acceleration.
Note that larger values produce lower acceleration. The rate applies in
both directions of rotation.
*This parameter has a default setting of 60s in Unidrive VTC.
Set Pr 0.04 at the required rate of deceleration.
Note that larger values produce lower deceleration. The rate applies in
both directions of rotation.
*This parameter has a European and USA default setting of 0 in Unidrive
VTC.
The default setting of Pr 0.05 depends on the default configuration of the
drive and the operating mode, as follows:
The default settings apply also when a macro is enabled.
0.00
Operating mode, Macro selection, Configuration,
Saving
RW Uni R
Ú
0 to 9,999
Ö
0
Value Function
1000 Save new parameter-values
1233
Restore parameters to their default values for 50Hz
AC supply
frequency (Europe)
1244
Restore parameters to their default values for 60Hz
AC supply
frequency (USA)
1253
Enable the operating mode of the drive to be changed and restore
parameters to their default values for 50Hz
AC supply frequency
(Europe)
1254
Enable the operating mode of the drive to be changed and restore
parameters to their default values for 60Hz
AC supply frequency (USA)
2001 Macro 1 Easy mode
2002 Macro 2 Motorized potentiometer
2003 Macro 3 Preset speeds
2004 Macro 4 Torque control
2005 Macro 5 PID control
2006 Macro 6 Axis-limit control
2007 Macro 7 Brake control
2008 Macro 8 Digital lock / shaft orientation
0.01 {1.07}
OL> Minimum frequency
CL> Minimum speed
RW Uni
OL
Ú
0 to [Pr 0.02]Hz
Ö
0
CL
Ú
0 to [Pr 0.02]rpm
Ö
0
0.02 {1.06}
OL> Maximum frequency
CL> Maximum speed
RW Uni
OL
Ú
0 to 1,000Hz*
Ö
EUR> 50
USA> 60
CL
Ú
VT> 0 to 30,000rpm
Ö
EUR> 1,500
USA> 1,800
SV> 0 to 30,000rpm 3,000
For closed loop vector operation at motor frequencies greater
than 400Hz (24,000rpm for 2-pole motors) may result in
instability. For further advice, contact the supplier of the drive.
0.03 {2.11} Acceleration rate
RW Uni
OL
Ú
0.0 to 3,200.0s/100Hz
Ö
5*
CL
Ú
VT> 0 to 3,200.0
s/1,000rpm
Ö
2
0.2
SV> 0 to 32.000
s/1,000rpm
0.04 {2.21} Deceleration rate
RW Uni
OL
Ú
0.0 to 3,200.0s/100Hz
Ö
10*
CL
Ú
VT> 0 to 3,200.0
s/1,000rpm
Ö
2
0.2
SV> 0 to 32.000
s/1,000rpm
0.05 {1.14} Reference selector
RW Uni
OL
Ú
0 to 5
Ö
EUR> 0*
USA> 4*
CL
Ú
0 to 5
Ö
EUR> 0
USA> 0
EUR All operating modes 0 Terminal mode
USA Closed-loop modes 0 Terminal mode
USA Open-loop mode 4 Keypad mode
CAUTION