The current versions of PocketMAX and PocketMAX PC, as well as their
associated user manuals are available for download from our website at:
www.csi-wireless.com/products/software.shtml
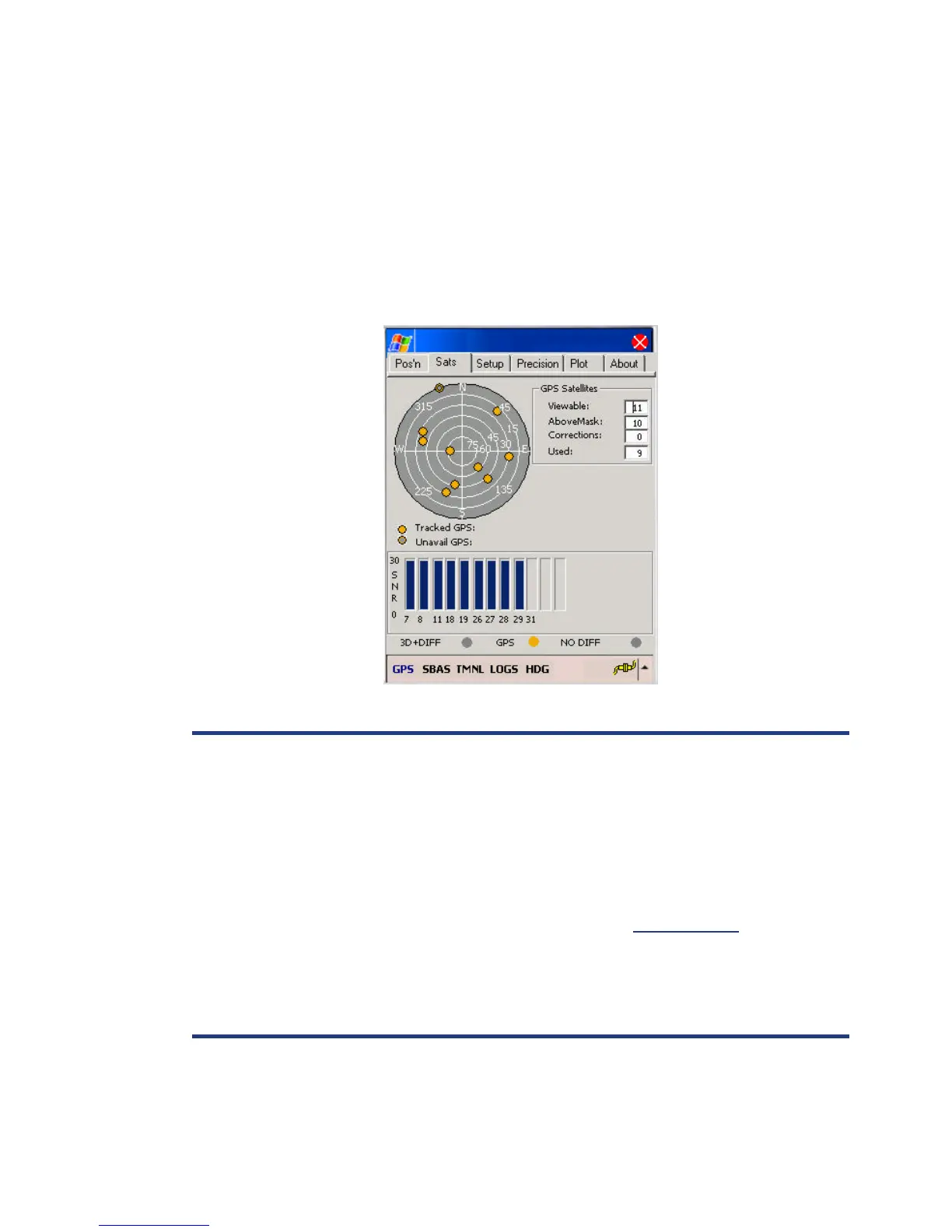
The following is an example screen capture from this utility.
Caution – It is important to note that when you are using
PocketMAX, the program is doing many operations behind the
scenes. This includes modifying the data output from the serial
port as the program requires, which is screen dependant. When
you close PocketMAX, it will give you a message confirming the
current settings. It will then ask you if you want to proceed and
save these settings or go back and change them. Once you have
the settings configured properly for you, it is imperative to let the
program close completely on its own before you disconnect or
power down the receiver. This may take up to 10 seconds. If this
is not performed, the receiver will not be configured as you feel it
should, and can output a mixture of binary and NMEA data.