AKD 2800
Programming
Function:
In these parameters 302-307 Digital inputs it is possible
to choose between the different enabled functions
related to the digital inputs (terminals 18-33).
Description of choice:
No operation is selected if the frequency converter is
not to react to signals transmitted to the terminal.
Reset resets the frequency converter after an
alarm; however, a few alarms cannot be reset
(trip locked) without first disconnecting the mains
supply and reconnecting it. See table under List
of warnings and alarms. Reset is activated on
the leading edge of the signal.
Coasting stop inverse is used for making the frequency
converter "let go" of the motor immediately (output
transistors are "turned off"), which means that the motor
runs freely to stop. Logic ’0’ leadstocoastingtostop.
Reset and coasting inverse are used to activate
motor coast simultaneously with reset. Logical
’0’ means motor coast stop and reset. Reset
is activated on the falling edge.
Quick stop inverse is used for activating the quick-stop
ramp down set in parameter 212 Quick stop
ramp-down time. Logic ’0’ leads to quick stop.
DC-braking inverse is used for stopping the motor by
energizing it with a DC voltage for a given time, see
parameters 126, 127 and 132 DC brake. Please note
that this function is only active if the value in parameter
126 DC braking time and 132 DC brake voltage is
different from 0. Logic ’0’ leads to DC braking.
Stop inverse, a logic ’0’ means that the motor speed
is ramped down to stop via the selected ramp.
None of the stop commands mentioned
above are to be used as repair switches.
Note that the frequency converter has more
voltage inputs than L1, L2 and L3 when the DC bus
terminals are used. Check that all voltage inputs are
disconnected and that the prescribed time (4 mins.)
has passed before repair work is commenced.
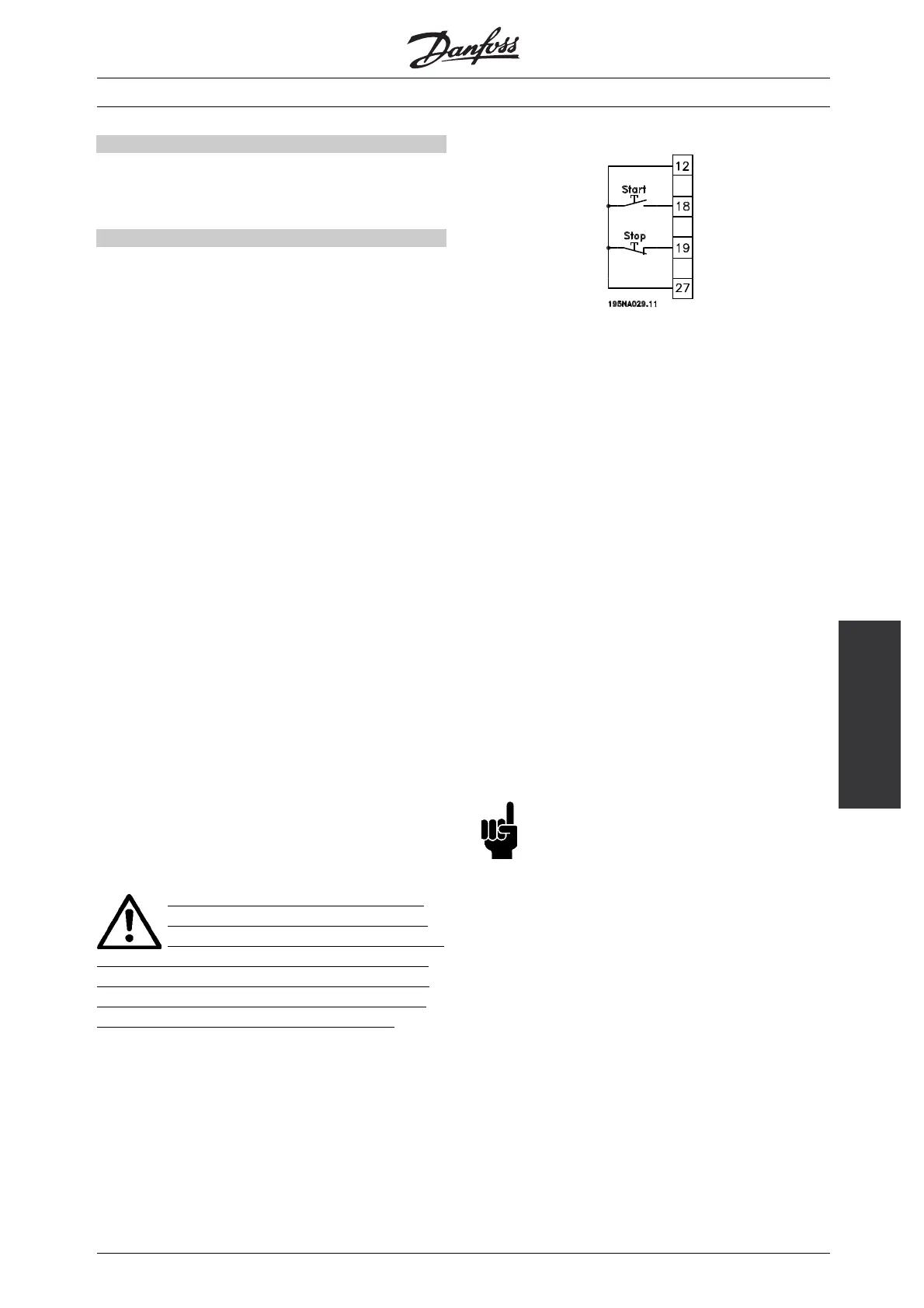
Start is selected if a start/stop command is required.
Logic ’1’ = start, logic ’0’ =stop.
Latched start, if a pulse is applied for min. 14 ms,
the frequency converter will start the motor, provided
no stop command has been given. The motor can
be stopped by briefly activating Stop inverse.
Reversing: Not used in AKD.
Reversing and start: Not used in AKD.
Start clockwise is used if you want the motor shaft only
to be able to rotate clockwise when started. Should
not be used for Process regulation, closed loop.
Start anticlockwise: Not used in AKD.
Jog: Not used in AKD.
Freeze reference freezes the present reference. The
reference can now only be changed via Speed up and
Speed down.Iffreeze reference is active, it will be saved
after a stop command and in the event of mains failure.
Freeze output freezes the present output frequency
(in Hz). The output frequency can now only be
changed via Speed up and Speed down .
NB!:
If Freeze output is active the frequency converter
can only be stopped if you select Motor coast,
Quick stop or DC braking via a digital input.
Speed up and Speed down are selected if digital
control of the up/down speed is required. This
function is only active if Freeze reference or Freeze
output frequency has been selected.
If Speed up is active the reference or output
frequency will be increased, and if Speed down
is active the reference or output frequency will be
reduced. The output frequency is changed via
the preset ramp times of 3 sec.
One pulse (logic ’1’ minimum high for 14 ms
and a minimum break time of 14 ms) will lead
to a speed change of 0.1 % (reference) or 0.1
Hz (output frequency). Example:
✭
= factory setting. () = display text [] = value for use in communication via serial communication port
MG.28.H2.02 -
29