Chapter 7 Motion Control ASDA-A2R Series
7-20 Revision December, 2014
Note 2: Position terminal command is determined by the previous terminal command
(Monitor variable 40h) plus DATA.
Note 3: Position terminal command is determined by the current feedback position (Monitor
variable 00h) plus DATA.
Note 4: Position terminal command is determined by the position latched by CAP (Monitor
variable 2Bh) plus DATA.
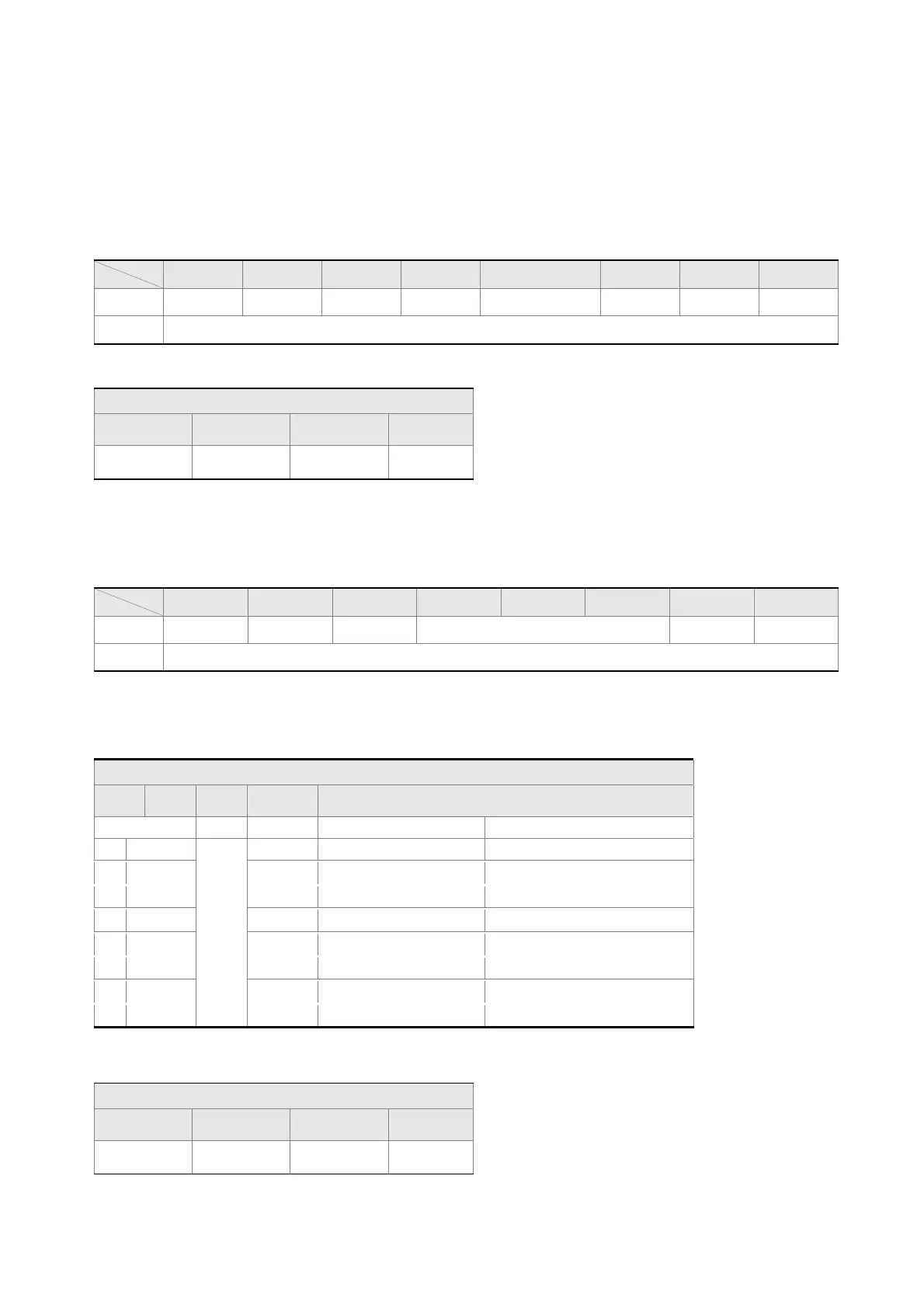
8) Special code: TYPE = 7, jump to the specified PR
31 ~ 28 27 ~ 24 23 ~ 20 19 ~ 16 15 ~ 12 11 ~ 8 7 ~ 4 3 ~ 0 BIT
DW0 - - DLY - FUNC_CODE - OPT 7
DW1 PATH_NO (0 ~ 63)
OPT:
OPT selection
7 6 5 4 BIT
- - - INS
PATH_NO: The jump target procedure number
FUNC_CODE: Reserved
DLY: The delay time after jump
9) Special code: TYPE = 8, write the specified parameter
31 ~ 28 27 ~ 24 23 ~ 20 19 ~ 16 15 ~ 12 11 ~ 8 7 ~ 4 3 ~ 0 BIT
DW0 0 S_D DLY DESTINATION OPT 8
DW1 SOURCE
DLY: The delay time after write
Bit28 ~ Bit31are not 0x0, then AL213 occurs.
S_D: Specified data source and written target.
S_D Specified Selection
27 26 25 24 BIT Description
SOUR Rsvd DEST Data Source Written Target
0 0
0
0 Constant Parameter, Px-xx
0 1 0 Parameter, Px-xx Parameter, Px-xx
1 0 0 Data array Parameter, Px-xx
1 1 0 Monitor variable Parameter, Px-xx
0 0 1 Constant Data array
0 1 1 Parameter, Px-xx Data array
1 0 1 Data array Data array
1 1 1 Monitor variable Data array
Rsvd is not 0, then AL213 occurs.
OPT
:
OPT Selection
7 6 5 4 BIT
- ROM AUTO INS
Para_Data: the written data

 Loading...
Loading...