3. Instruction Set
10. When M1 changes from OFF to ON, the setting for servo is as below.
Parameters Description CANopen address
P5-04 (16bit) Homing mode H2504
P6-00 (32bit) Homing setting H2600
P6-01 (32bit) Origin definition H2601
11. Any error occurs during operation, M1616 will be set to ON and the servo drive number that
shows error will be stored in D6000, error codes in D6001 and STEP that when error occurs in
D6002.
12. For corresponding SM and SR of the axes, refer to the DRVIC instruction (API331).
Example 1
1. When M0 changes from OFF to ON, the INITC instruction starts to initialize the servos at
station addresses 1–3 (should be in a consecutive order) The station address must start at 1
and the following addresses cannot be skipped or reserved. Set the acceleration time of servo
1 to 3000 ms and the deceleration time to 9000 ms, until M1615 is ON.
2. When M1615 is ON, the instruction starts enable the servo at station 1 and SM1640 is ON,
indicating Servo-ON.
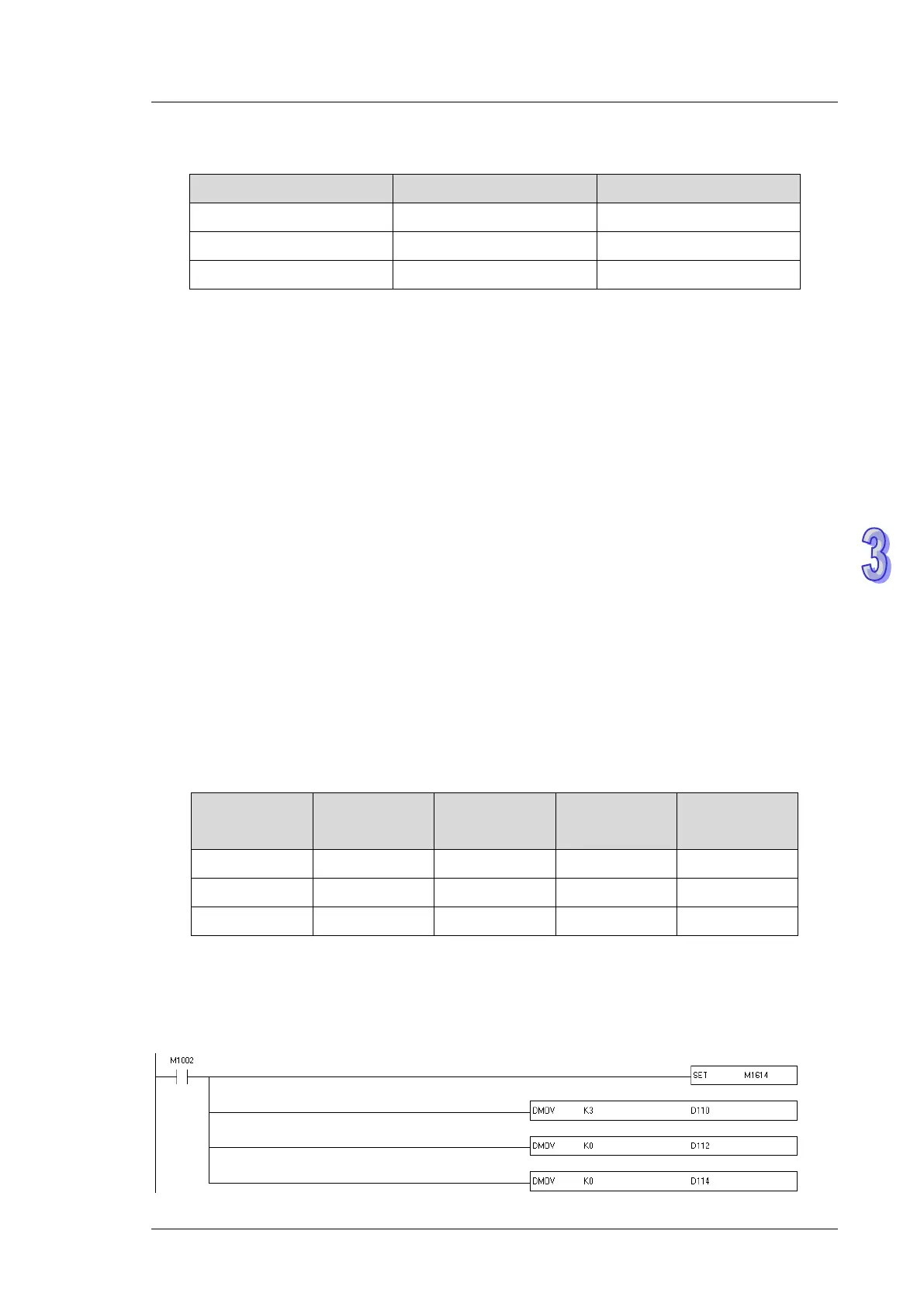
3. When M1 changes from OFF to ON, the setting for servo is as below.
Parameters Description
CANopen
address
Setting
value
Completion
flag
P5-04 (16bit) Homing mode H2504 D110=K3 M105
P6-00 (32bit) Homing setting
H2600 D112=K0 M106
P6-01 (32bit) Origin definition H2601 D114=K0 M107
4. When M6 changes from OFF to ON, the homing function is enabled for servo 1. After homing
is complete, M1624 is ON.