12 Descriptions of Parameter Settings | VFD-ED
Encoder PPR
Control Mode
VFPG FOCPG
FOCPM
Default: 2048
Settings 1–25000
Sets the encoder pulses per revolution (PPR).
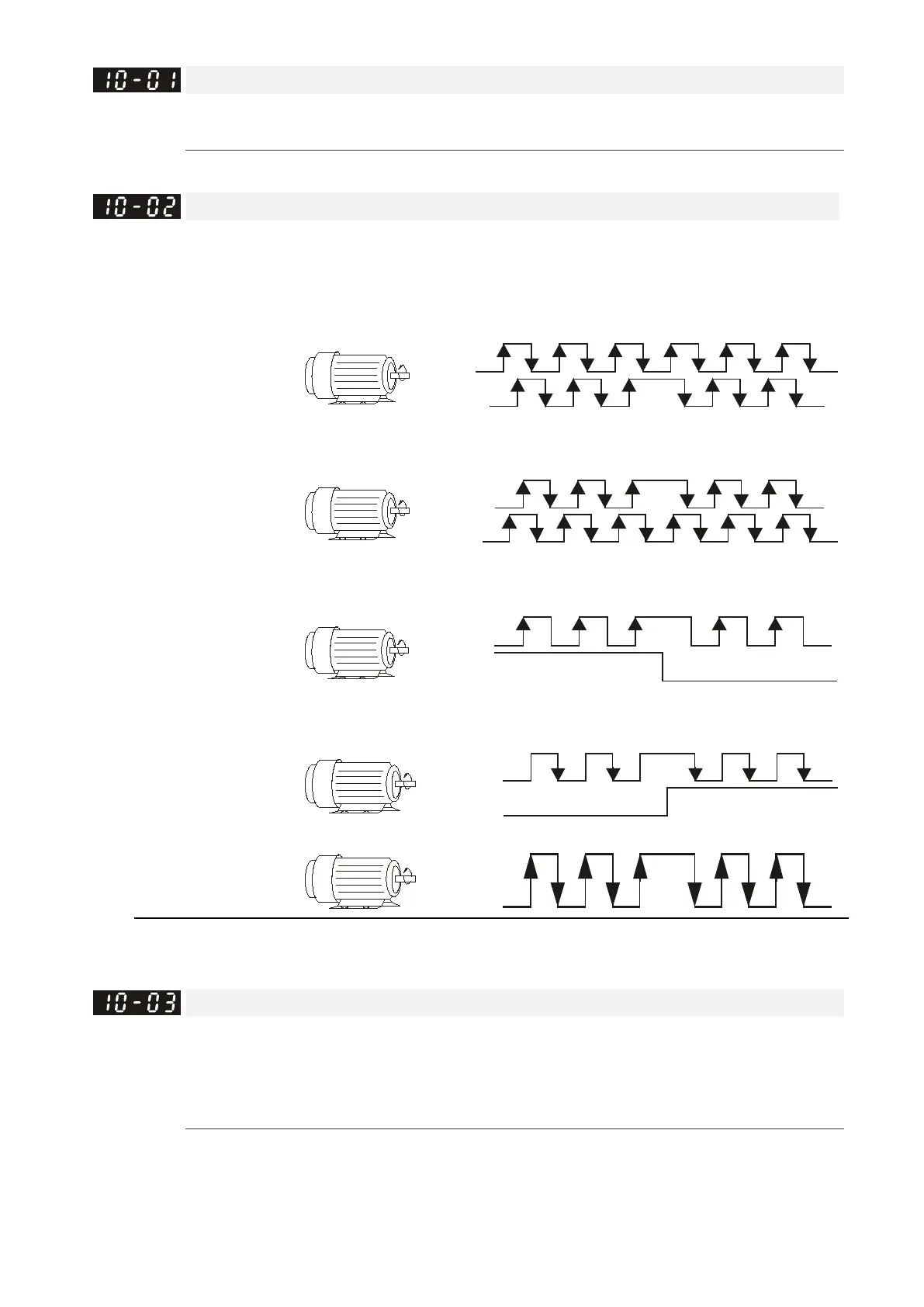
Encoder Input Type Setting
Control Mode
VFPG FOCPG FOCPM Default: 0
Settings 0: Disable
1: Phase A leads in a forward run command and phase B leads in a reverse run
command
2: Phase B leads in a forward run command and phase A leads in a reverse run
command
3: Phase A is a pulse input and phase B is a direction input. (low input=reverse
direction, high input=forward direction)
4: Phase A is a pulse input and phase B is a direction input. (low input=forward
direction, high input=reverse direction)
5: Single-phase input
When Pr.10-00 is set to 3, 4, 5 or 6, Pr.10-02 can be only set to 0, 1 or 2, and you cannot use 3, 4 and 5.
You must enter the correct pulse type for stable control.
Encoder Feedback Signal Fault Action (PGF1, PGF2)
Control Mode
VFPG FOCPG
FOCPM
Default: 2
Settings 0: Warn and keep operation
1: Fault and ramp to stop
2: Fault and stop operation
When Pr.10-03 is set to 1 (Fault and ramp to stop), if brake or operation contactor is OFF under the
circumstance that STO or MI40 (Enable drive function) is not deactivated during deceleration, elevator still
runs even brake has engaged (brake wear), and electric arc occurs when operation contactor is OFF.

 Loading...
Loading...






