Chapter 12 Descriptions of Parameter SettingsC2000 Plus
12.1-11-14
11-40
Position Control Command Source
Default: 0
Settings 0: Input from internal register
1: Input from external pulse
2: RS-485
3: CANopen
5: Communication card
11-42
System Control Flag
Default: 0000h
Settings 0000–FFFFh
bit No. Function Description
0
Current limit selection of the
speed control in torque mode
0: The speed control in torque mode, the maximum current
limit is the torque command.
1: The speed control in torque mode, the maximum current
limit is Pr.06-12.
1
FWD / REV action control
0: FWD / REV cannot be controlled by Pr.02-12 bit0 & 1
1: FWD / REV can be controlled by Pr.02-12 bit0 & 1
11-43
Position Control Maximum Frequency
Default: 60.00
Settings 0.00–599.00 Hz
Set the maximum operating frequency when the drive is in position control mode.
Also sets the speed limit for pulse-train positioning position control. If the output frequency
reaches the maximum frequency for position control, the system uses the maximum frequency
for position control as the operating frequency and slowly executes the remaining pulse-train
commands.
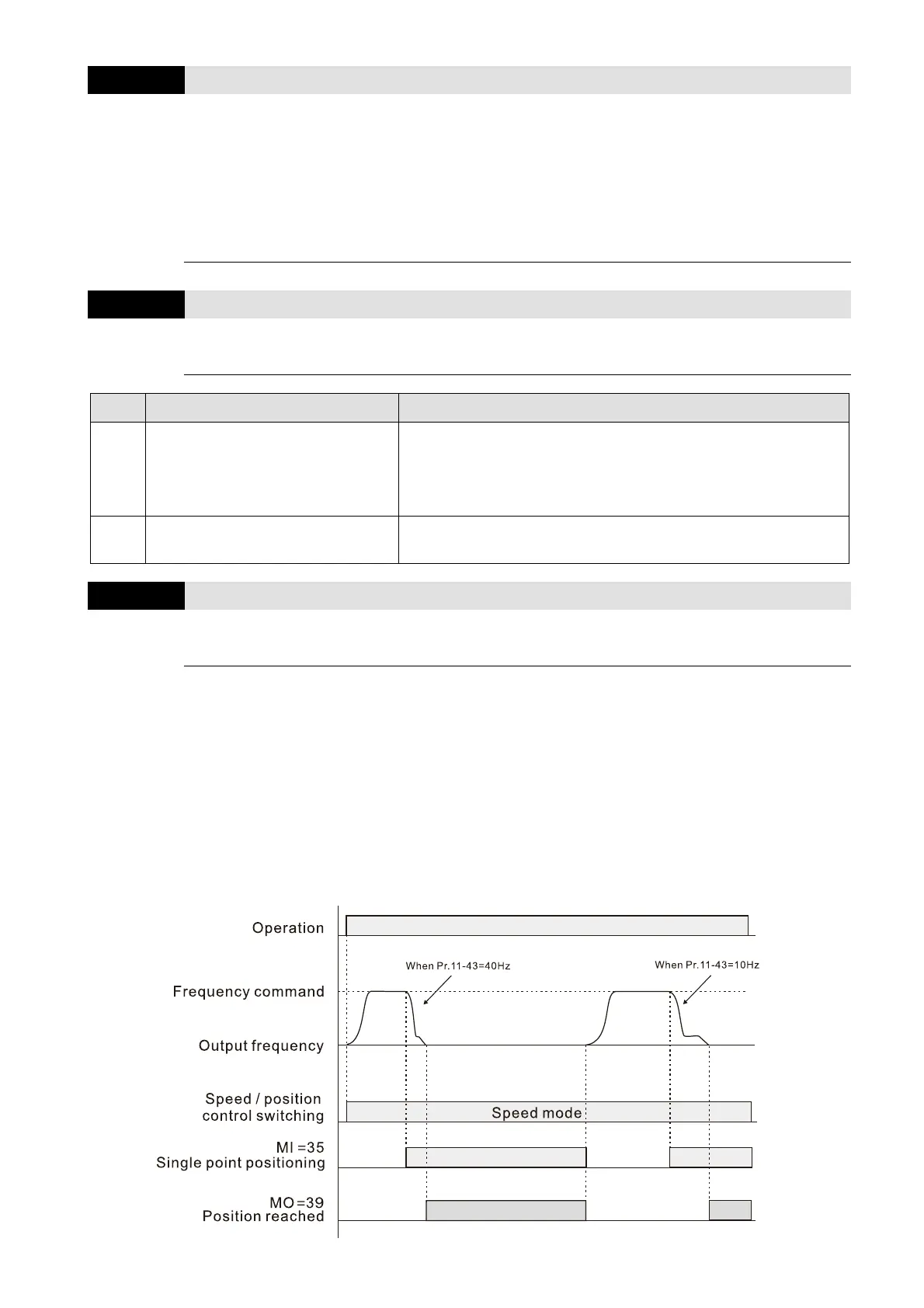
If the multi-function input terminal MIx = 35 (enable single-point positioning) is enabled under
the speed mode, the drive executes single-point positioning according to Pr.11-43 setting. Refer
to the diagram below when Pr.11-43 is set to 40 Hz and 10 Hz respectively.
 Loading...
Loading...
