U Page 46
Digital controller RK 4004
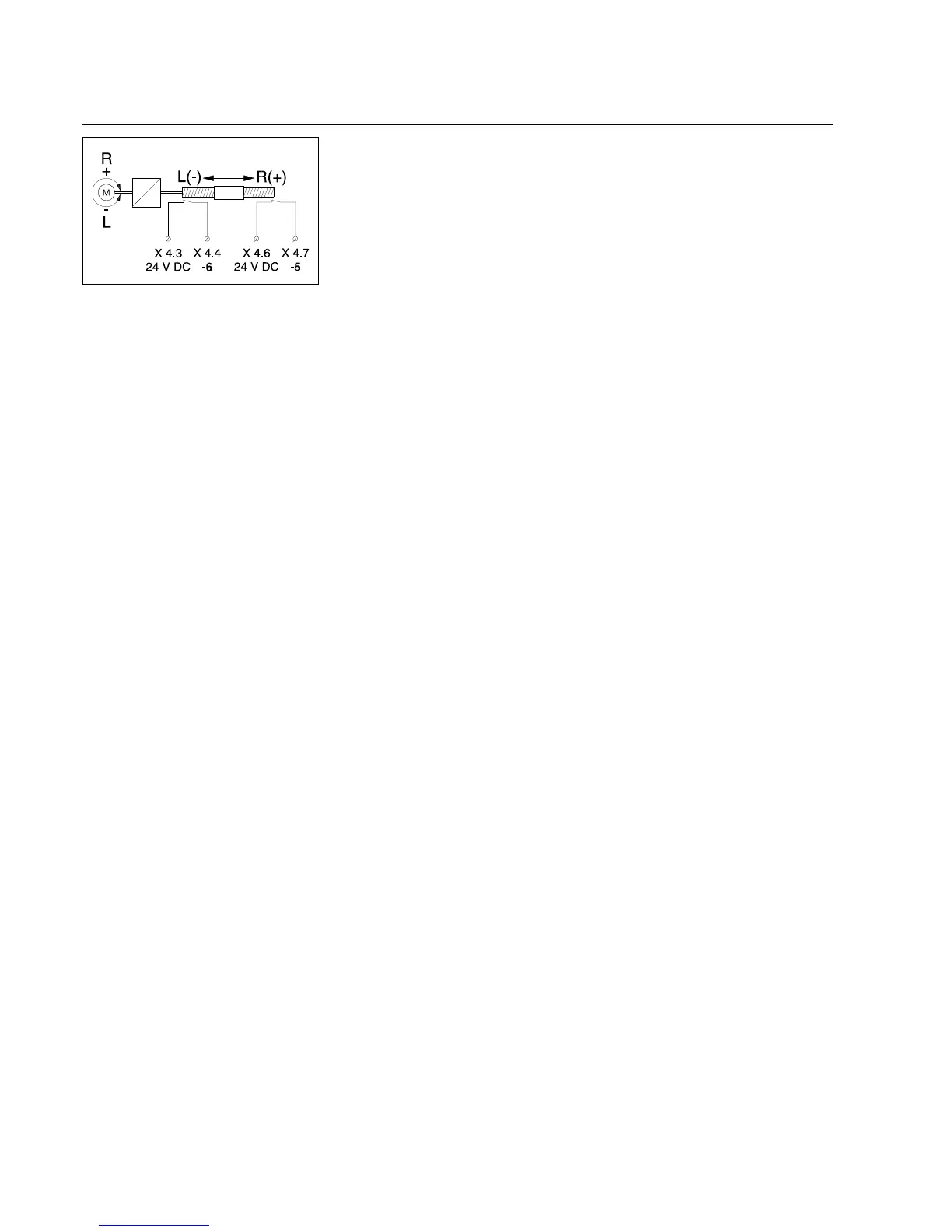
Example 2:
The positioning range is to be limited by two separate break contacts.
The inputs X 4.4 and X 4.7 should be assigned as follows:
Input X 4.4 is assigned the value -6. At signal 0 the negative motor
direction of rotation is stopped.
Input X 4.7 is assigned the value -5. At signal 0 the positive motor di-
rection of rotation is stopped.
If the circuit is set up with make contacts, value 5 or 6 must be set.
.8.7. reserved 87
Not assigned at present.
.8.8. reserved 88
Not assigned at present.
.8.9. reserved 89
Not assigned at present.
.9.0. reserved 90
Not assigned at present.
.9.1. system config.
Parameter block for application adaptation.