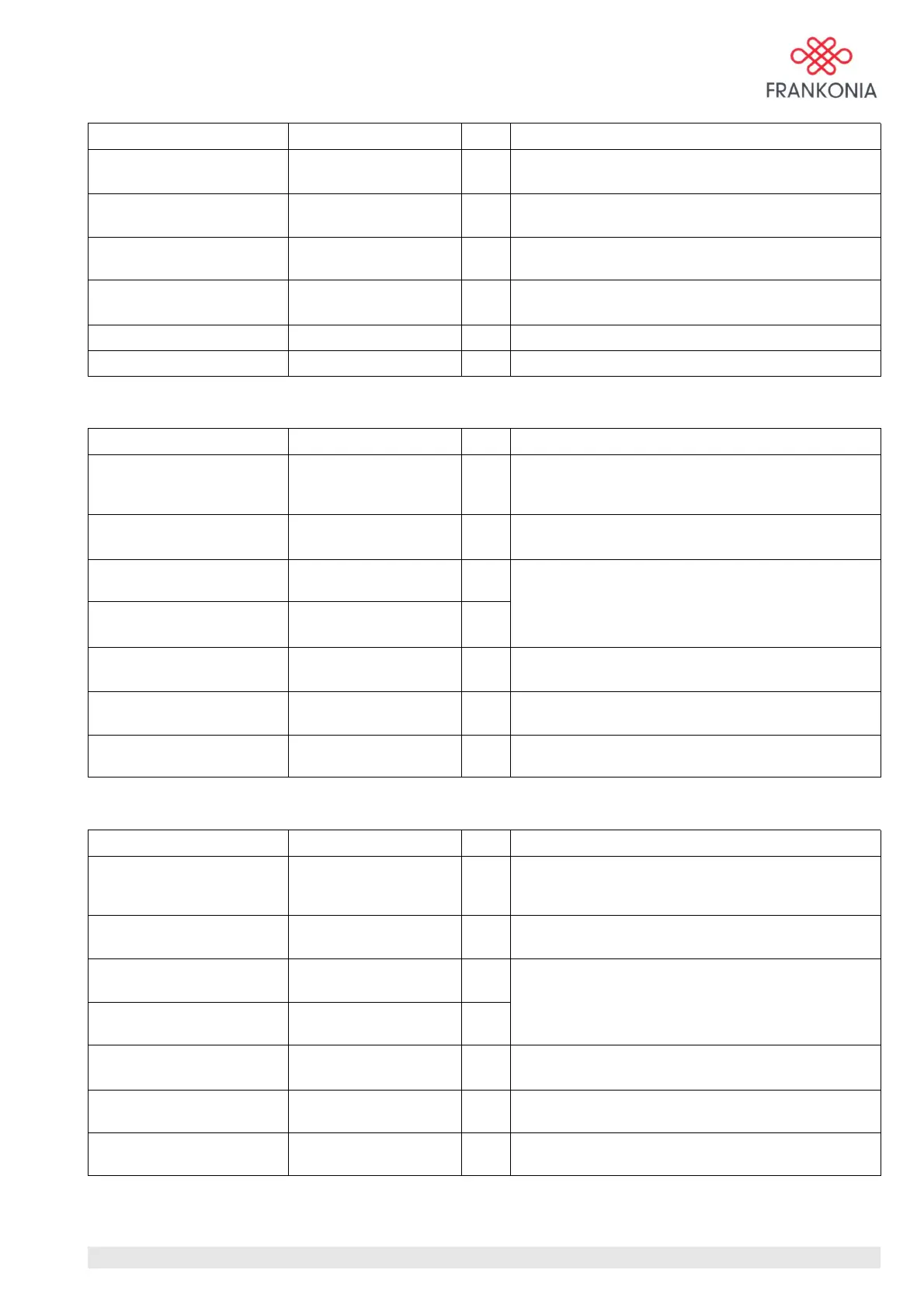
Command Parameter Unit Result
POS[:X][:DIST]:OFFS[1/2]{
?}
<NRf / ±1> / MIN /
MAX
m Offset with horizontal [1] and vertical [2] polarization.
POS[:X][:DIST]:VEL{?} <NRf / 1...30> / MIN /
MAX
Velocity in steps.
POS[:X][:DIST]:DIR{?} UP / DOWN Determination of direction, however no automatic
movement.
[POS:]POL{?}
<NRf / ±/2> / MIN /
MAX
rad Turns antenna into the programmed position.
[POS:]POL:HOR Turns antenna into vertical polarization.
[POS:]POL:VERT Turns antenna into horizontal polarization.
Input/Output subsystem for the turntable (TTAB):
Command Parameter Unit Result
POS[:X]:ANGL[:IMM]{?}
<NRf / ±200> / MIN /
MAX / UP / DOWN
deg The turntable moves into the programmed position,
or direction, resp. (UP = clockwise). On inquiry, the
actual position is reported.
POS[:X]:ANGL[:IMM]:STEP
{?}
<NRf / 0..200> / MIN /
MAX
deg Step width at POS UP / DOWN command.
POS[:X]:ANGL:LIM:HIGH{?
}
<NRf / 0..200> / MIN /
MAX
deg
POS[:X]:ANGL:LIM:LOW{?
}
<NRf / -200..0> / MIN /
MAX
deg
Upper and lower limit value of the position.
POS[:X]:ANGL:OFFS{?}
<NRf / ±200> / MIN /
MAX
deg Offset of the position. The limit values remain
unchanged!
POS[:X]:ANGL:VEL{?} <NRf / 1..30> / MIN /
MAX
Velocity in steps.
POS[:X]:ANGL:DIR{?} UP / DOWN Determination of direction (UP = clockwise), but no
automatic movement.
Input/Output subsystem for the clamp line (ACL):
Command Parameter Unit Result
POS[:X][:DIST][:IMM]{?} <NRf / 0...10> / MIN /
MAX / UP / DOWN
m The absorber clamp moves into the programmed
position, or direction, resp.. On inquiry, the actual
position is reported.
POS[:X][:DIST][:IMM]:STE
P{?}
<NRf / 0...10> / MIN /
MAX
m Step width at POS UP / DOWN command.
POS[:X][:DIST]:LIM:HIGH{?
}
<NRf / 0...10> / MIN /
MAX
m
POS[:X][:DIST]:LIM:LOW{?
}
<NRf / 0...10> / MIN /
MAX
m
Upper and lower limit value for the position.
POS[:X][:DIST]:OFFS{?}
<NRf / ±1> / MIN /
MAX
m Offset for the position.
POS[:X][:DIST]:VEL{?} <NRf / 1...30> / MIN /
MAX
Velocity in steps.
POS[:X][:DIST]:DIR{?} UP / DOWN Determination of direction, but no automatic
movement.
MA_FC02_(Rev2_1) - 9/06 / Version 1 / Rev:2.1
19 / 24