Finally, install two 18650 batteries. Please refer to About_Battery.pdf in the unzipped folder.
Please push the battery to + ends of battery holder to make the connection good enough.
Run program
In the first chapter, we did not install the Pan-Tilt. Because we need to run programs for the installation of the
servos to ensure that the servos rotate to the correct angle.
Next let us install the Pan-Tilt.
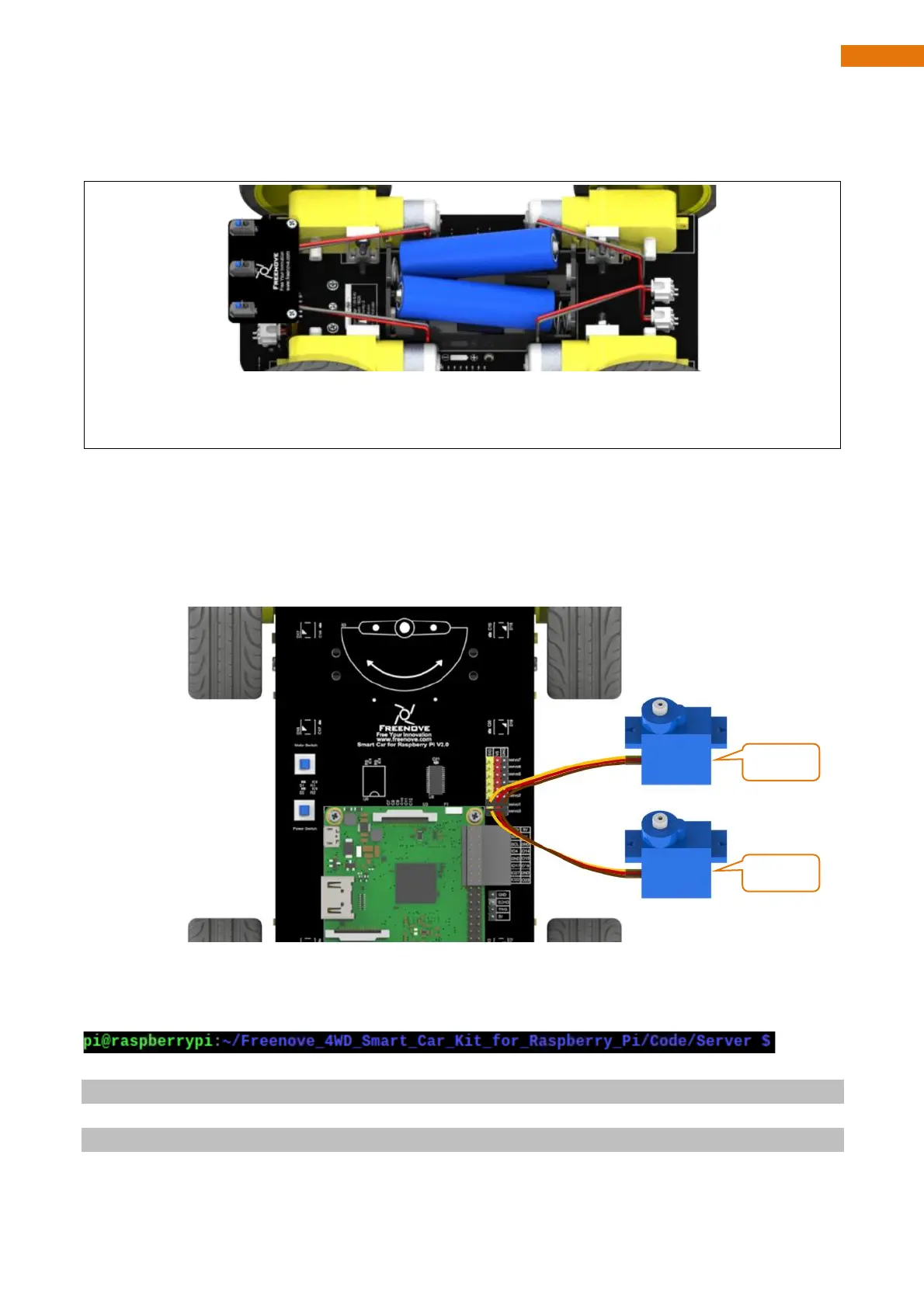
Connect two servos to port Servo0 and port Servo1 on the smart car board. And please remember the
numbers of the servos.
Enter the following command in the terminal:
If the terminal displays the directory as below (where test.py is located). You can directly execute the servo.py
command.
1.If not, execute the cd command:
cd ~/Freenove_4WD_Smart_Car_Kit_for_Raspberry_Pi/Code/Server
2.Execute Servo.py command:
sudo python servo.py
Then servos rotate to a proper angle. Please keep the connection between the servos and the smart car board.
 Loading...
Loading...