Camera
Next let us connect the camera to smart car board. First turn off S1 (Power Switch), shut down Raspberry Pi
and disconnect power cable. If the data cable is used to power the Raspberry Pi, disconnect the data cable
and install the CSI camera to the Raspberry Pi camera interface when the Raspberry Pi is powered off. (The
CSI camera must be connected or disconnected under no power and when Raspberry Pi is shut down,
or the camera may be burned.)
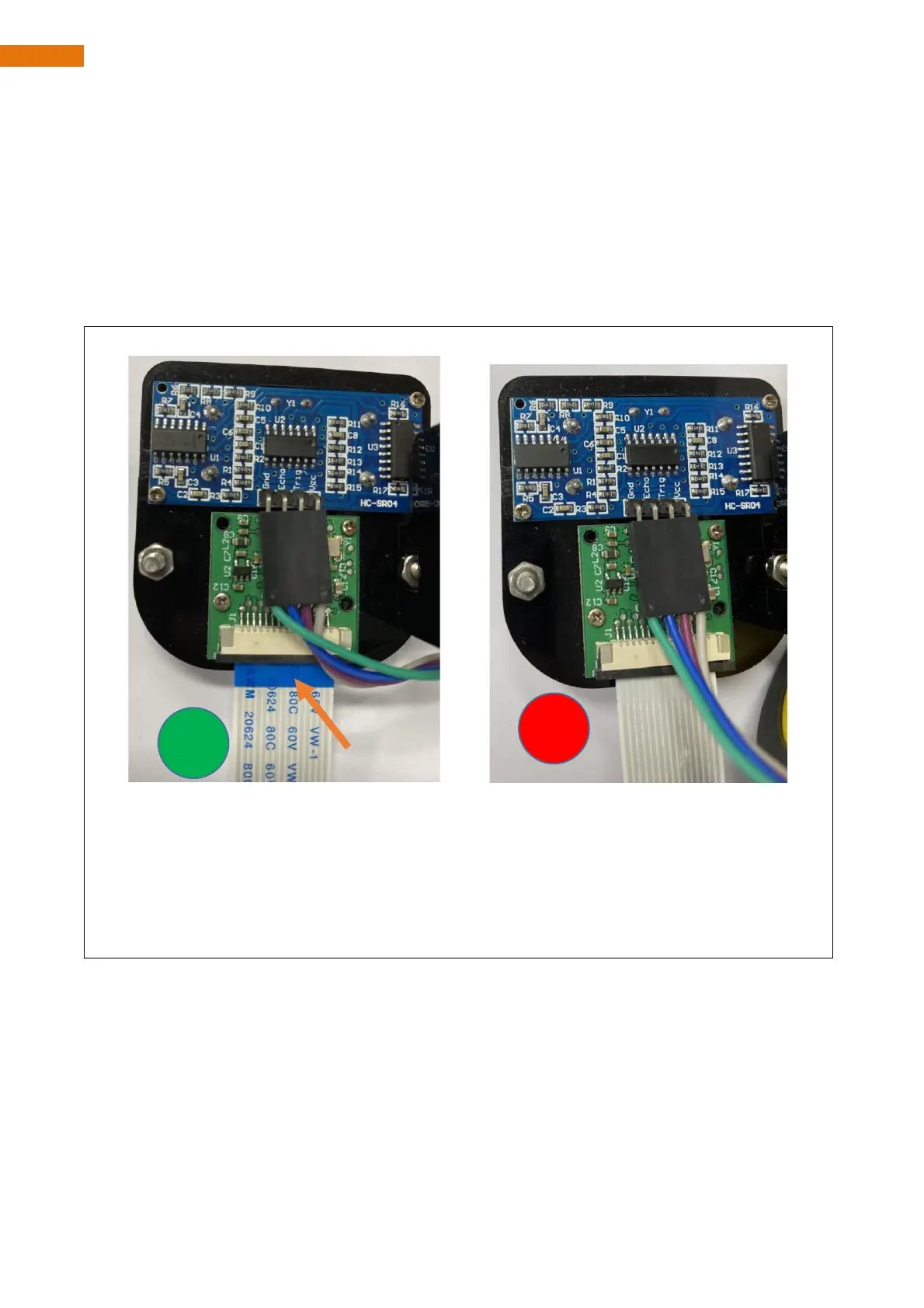
Step 1
The Blue side of cable should be toward to Servo.
Connect one end of cable to camera. Please note the front and back of the cable.
 Loading...
Loading...