4
NAVpilot-711C
2.1 Interconnection
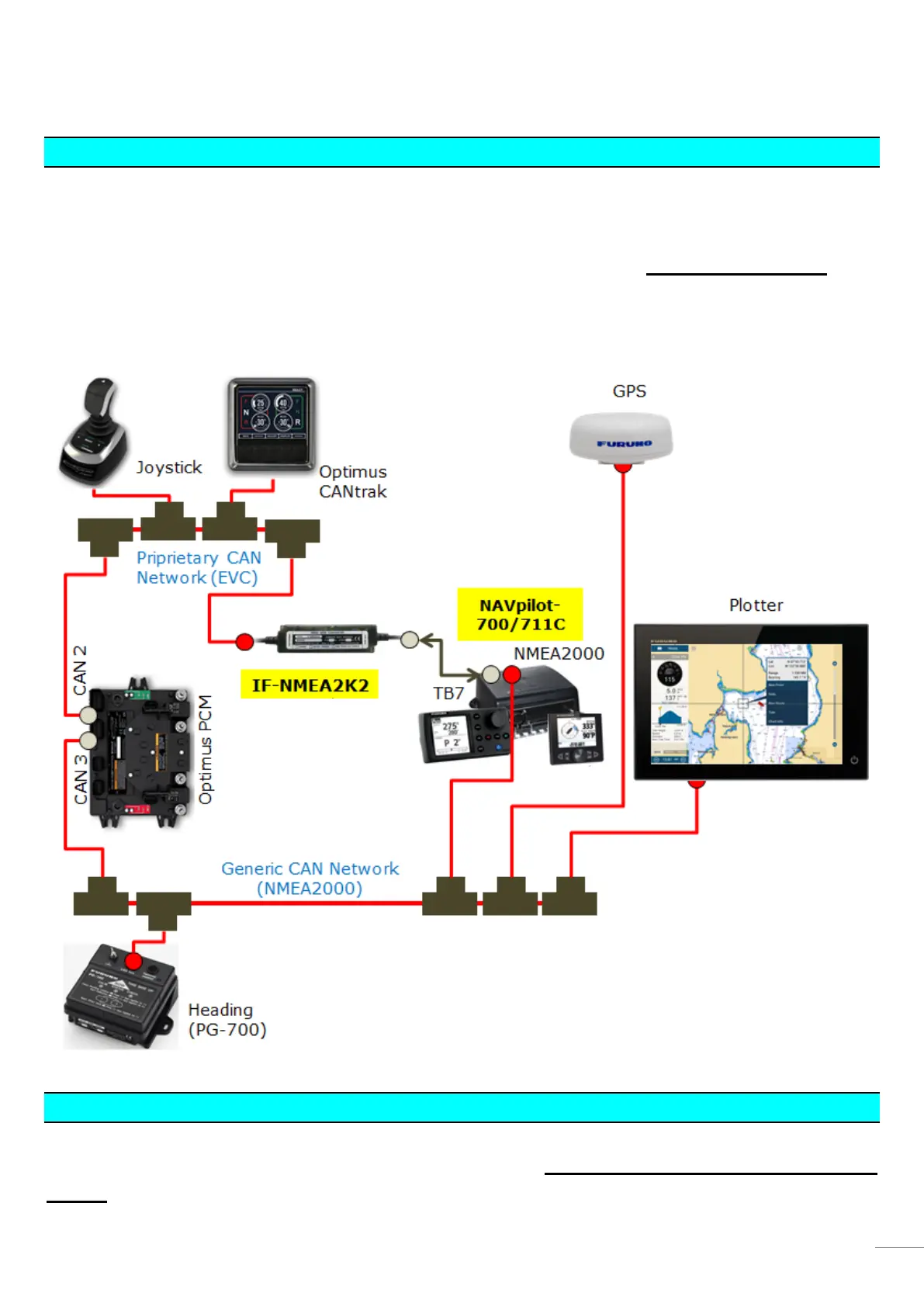
The following drawing shows an overview of NAVpilot-711C connected to the Seastar
Optimus network. The NAVpilot-711C processor unit FAP-7002 is connected to the
Seastar Optimus system EVC bus, CAN2 via the IF-NMEA2K2 (v01.16 or later). The
NMEA2000 port is connected to the NMEA2000 backbone to communicate for navigation
data.
2.2 Wiring IF-NMEA2K2 to EVC (CAN 2)
No special procedure is required: Just connect the NMEA2000 connector (Micro-C,
male) of IF-NMEA2K2 to the backbone of Seastar Optimus CAN2 network.

 Loading...
Loading...



