29
GOV.Expert(GovernorExpertSetting)
GOV.Expert(GovernorExpertSetting)
7KLVPHQXVHWVWKH*RYHUQRU([SHUWSDUDPHWHUVDOORZLQJWKHXVHUWRIXUWKHUUH¿QHWKHJRYHUQRUVHWWLQJV
*29(;3(57VFUHHQIURPWKH(;3(570(18'VFUHHQ
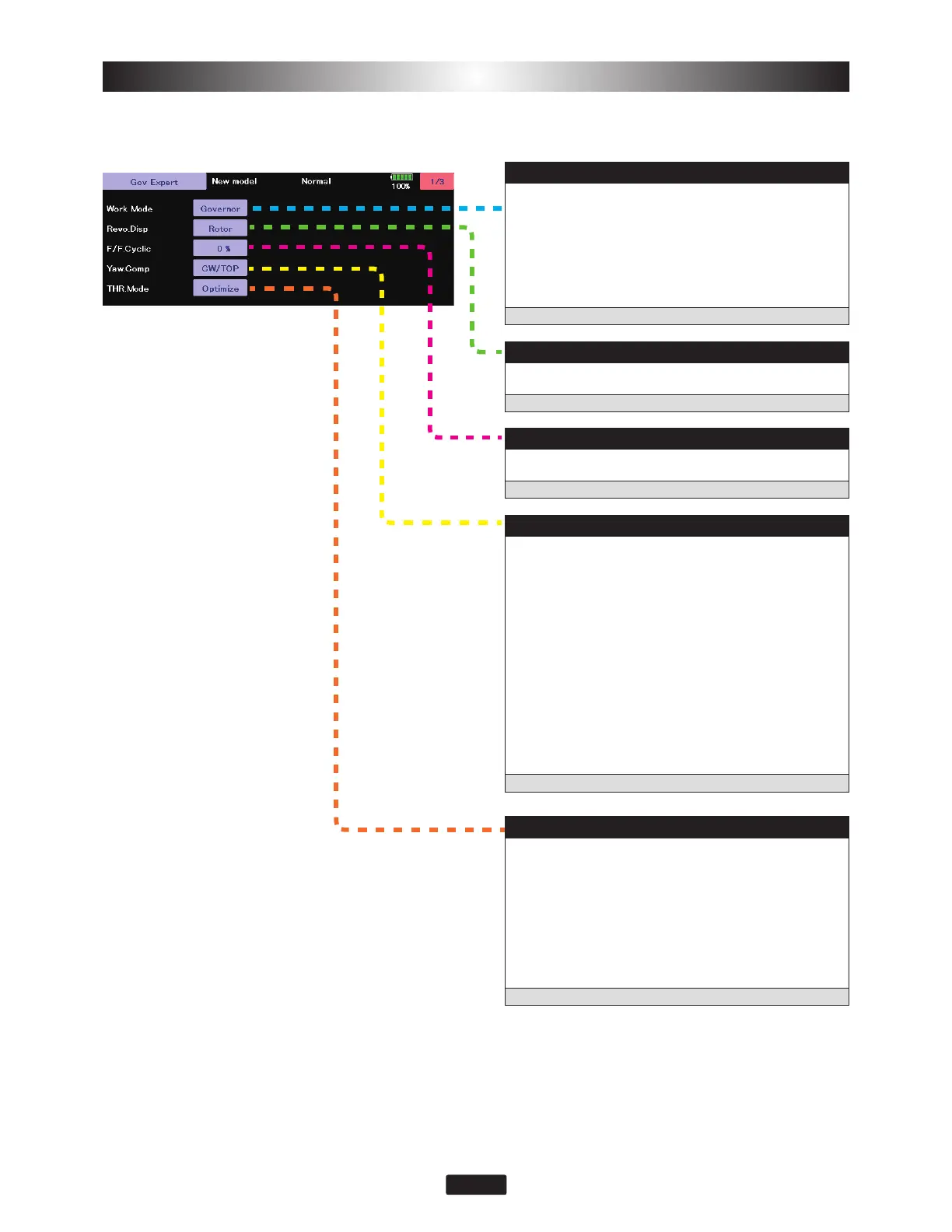
(1) Work Mode: Governor working mode
Sets the governing type mode.
- GOVERNOR (Governor Mode) – RPM is entirely controlled by the GOV
once it has engaged. The GOV will do whatever it takes to hold a constant
RPM throughout flight.
- Rev. Lmt (Limiter Mode) – Throttle control follows the throttle curves to
advance the throttle position during flight, but controls the RPM during
throttle reduction by not letting the RPM overspeed past the set RPM.
When the Rev.Lmt mode is selected, the menu (5) "THR. Mode" should be
set to Tx.Curve mode.
Setting:GOVERNOR/Rev.LmtInitialsetting:GOVERNOR
(2) Revo Disp: Governor working mode
This enables the user to display either the desired rotor RPM or the Engine
RPM accordingly.
Setting:Rotor/EngineInitialsetting:Rotor
(3) F/F. Cyclic: Feed Forward from Cyclic
Increasing the value will add throttle with cyclic commands to aid in RPM
stability.
Settingranges:0~100%Initialvalue:0%
(5) THR. Mode: Throttle data mode
This parameter selects the throttle input operation.
Optimize:
CGY sets the throttle input signal to optimum. There is no need to consider
the throttle curve setting on the transmitter.
Fixed:
This is the suggested mode for use with electric motors. This setting ensures
that there is a fixed throttle input as is related to the helicopter revolution.
Tx.Curve:
If this mode is selected, the CGY uses the exact throttle input from the transmit-
ter. As such, the throttle curve setting on the transmitter is required.
Note: when the Rev.Lmt mode is selected, this mode should also be selected.
Setting:GOVERNOR/Rev.LmtInitialsetting:GOVERNOR
(4) Yaw. Comp: Governor working mode
Yaw compensation allows the governor to more rapidly correct for changes
in power demands of the model resulting from yaw input. Set the mode to
match the gyro installation direction. Select from: CW/TOP, CW/BOTM,
CCW/TOP, CCW/BOTM.
Note: if the user has selected the governor only mode, this parameter is in-
hibited.
Revolution fluctuation in the case of pirouettes
The governor detects the rpm via the revolution sensor mounted in the
engine section. During a pirouettes, the helicopter itself rotates, so that its
pirouettes speed is added (reduced) to the engine speed. Therefore, the
main rotor speed will fluctuate accordingly. Since the CGY has a gyro, it can
accurately measure the pirouette speed. The yaw rate correction is thus de-
termined by a combination of gyro function and governor function.
CW: clockwise rotor direction
CCW: counter clockwise rotor direction
TOP: Gyro top/name emblem facing up
BOTM: Gyro top/name emblem facing down
Setting:CW/TOP,CW/BOTM,CCW/TOP,CCW/BOTMInitialsetting:CW/TOP

 Loading...
Loading...










