Step 4:
Optional setting for Roll and Nick
transmitter, briefly set the yaw command fully to the right.
Turn the Copter so that the nose turns more than 45
degrees to the right; the axis is displayed, the field is no
longer highlighted and identification of this axis is complete.
The gyros and operating directions have now been assigned.
Now check to make sure that the operating directions are
correct:
Ð To do this remove the propeller of the copters and give
approximately a quarter of gas, all motors are running at
the same speed
Ð Tilt the Copter in Attitude mode so that its nose is facing
downwards
the front motors must turn faster than
back ones
Ð Tilt the Copter in Attitude mode to one side
the motors
of the side, in witch you tilt the model, must turn faster
then the motors on the other side.
Ð If one of the directions of operation is wrong, you must
repeat the axis assignment process.
Roll and Nick setting
For Attitude and Rate mode:
ROLL/NICK P:
Set this parameter in steps of 5 higher and higher, until a me-
dium-speed overshoot occurs. Then go 5-10 steps back in
order to prevent the soar up climb in case of full throttle.
ROLL/NICK D:
Now adjust well to the D component in steps of 5, until the
Copter engages exactly on nick and roll. A too high value
leads to very rapid oscillations.
DAMPING:
The damping factor should be set as low as possible, but as
high as necessary, so that the PID control can operate opti-
mally and the setting can be increased at best. If you do not
get vibrations away with the PID settings , then change the
damping of a step and test whether the setting works better
or worse.
Recommended settings:
For Racecopter with fast controllers and 5-6 inch propellers: 0
For Copter with 8 inch propellers and fast controllers: 1
Copter with large propellers: 2
ROLL FACTOR %:
Set the Roll setting as percent value of the overall gain. For
symmetric Copters the value can be 100. If, because of its
gravity centre, the Copter is more agile on the Roll axis than
on the Nick axis, then you can change here the roll factor. In
the Graupner ALPHA RACE 250 Q this value is set about 65%.
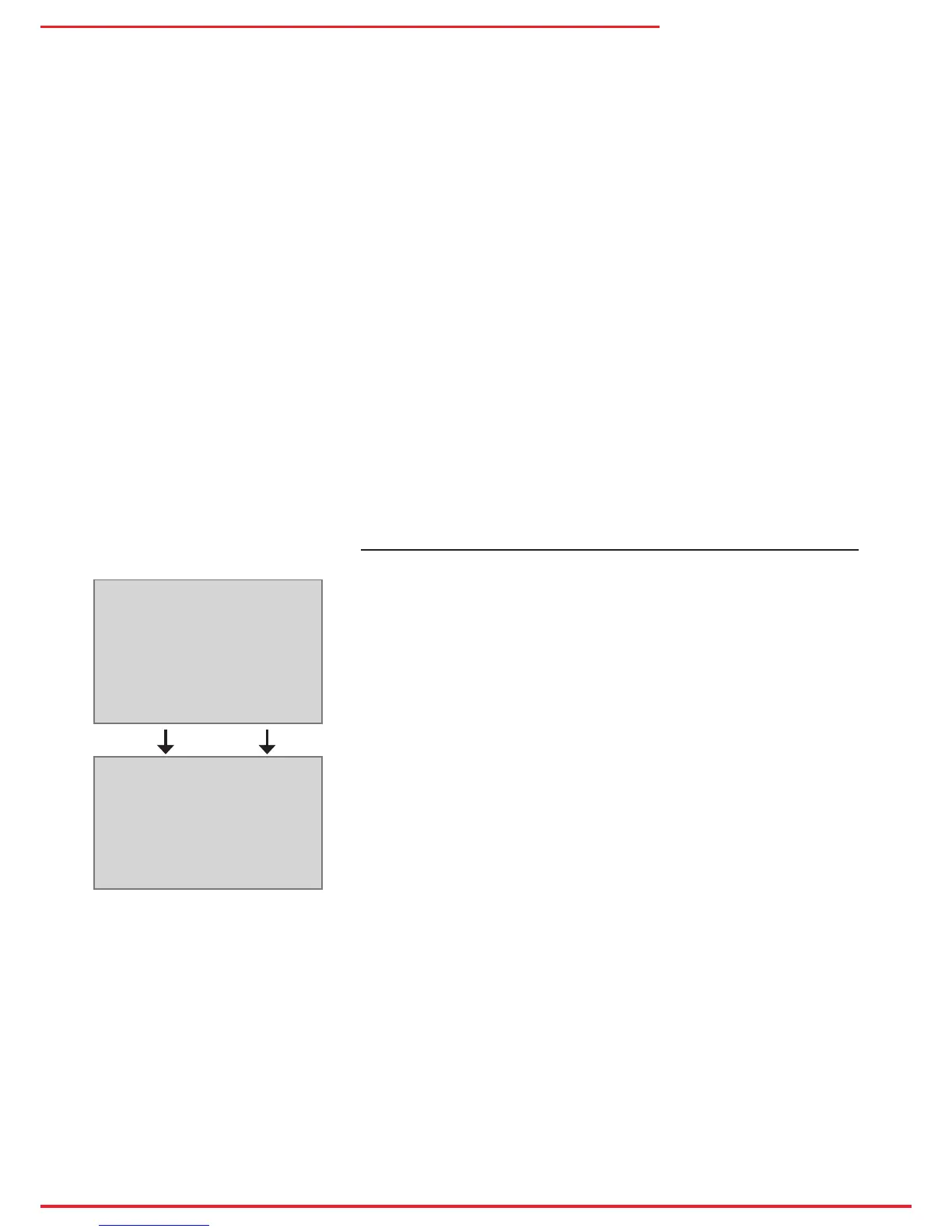
POWER2SENS.:
Multicopter RO/NI< >
>ROLL/NICK P 50
ROLL/NICK D 30
DAMPING 0
ROLL FACTOR % 65
POWER2SENS. 80
--ATTITUDE MODE--
ROLL/NICK I 40
AGILITY 3
Multicopter RO/NI< >
--RATE MODE--
R/N RATE I 25
RATE 3