Step 1:
Setting the flight mode - Attitude or
Rate mode
Step 2:
Main settings
Transmitter pre-setting
In the transmitter it must be selected a free model memory,
the model type must be “surface model“ and the channel 1
direction must be set so that in “motor off“ position the power
indicator must show -100%.
The flight mode must be set on channel 5. Then program a
two-way switch for channel 5 to control the flight mode:
Attitude mode: Channel 5 = -100% to 0%. The stick movement
determinates the Copter reaction on Roll and Nick. It allows
a maximal angle of about 50° at 100% of stick movement.
Mode suggested for beginners. The stick movements acts
directly proportionally to Roll and Nick.
Rate mode: Channel 5 = 0% to +100%. The stick movement
determinates the rate without angle limit. Aerobatic mode that
allows Rolls and Loopings.
Main settings
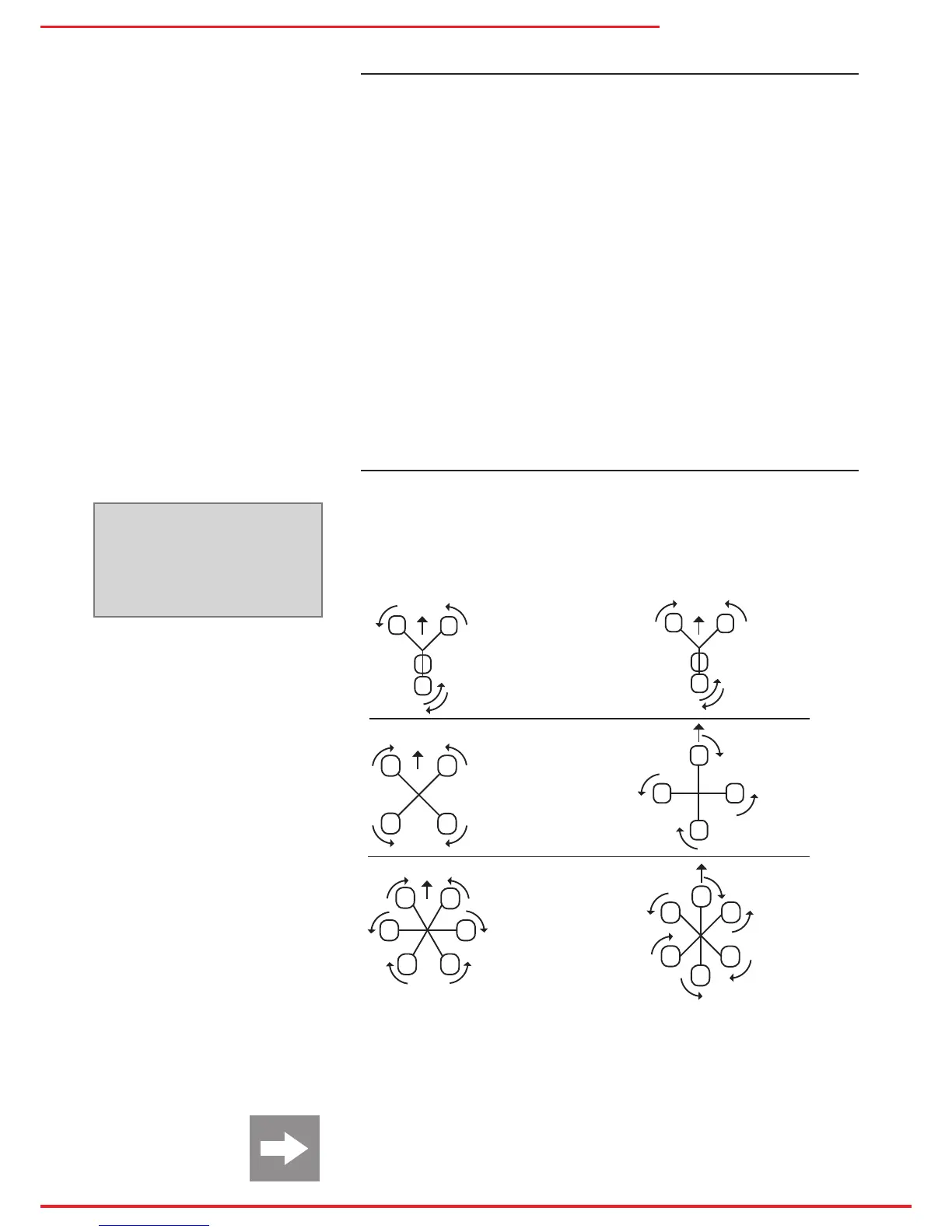
Type
Quadro x, Quadro +, Hexa I, Hexa V,Tri L, Tri R
Channel connections to the receiver for the different copter
types, motor and speed controller connection seen from the
top. In case of tricopter use only digital servos for servo 4.
Mode
ESC settings for the learning of the controller the receiver K1
signal will be passed directly to the controller.
Normal is set for ‘normal‘ multicopter (without clockwise rota-
tion).
Note: For safety reason the Type and Mode changes take effect
after switching off and on (only for this parameter). Which con-
MULTICOPTER BASE < >
>TYPE QUADRO X
MODE NORMAL
MINPOWER % 10
LOGGING 1
CALIBR. POSITION NO
1
2
3
1
2
3
4
1
2
3
1 2
3
4
6
1
2
3
4
5
1
2
3
4
5
6
Tri L Tri R
Quadro X Quadro +
Hexa IHexa V
R+L= Servo direction
Servo 4 = Yaw
4
4