Baserunner Controller User Manual
Rev 1.0
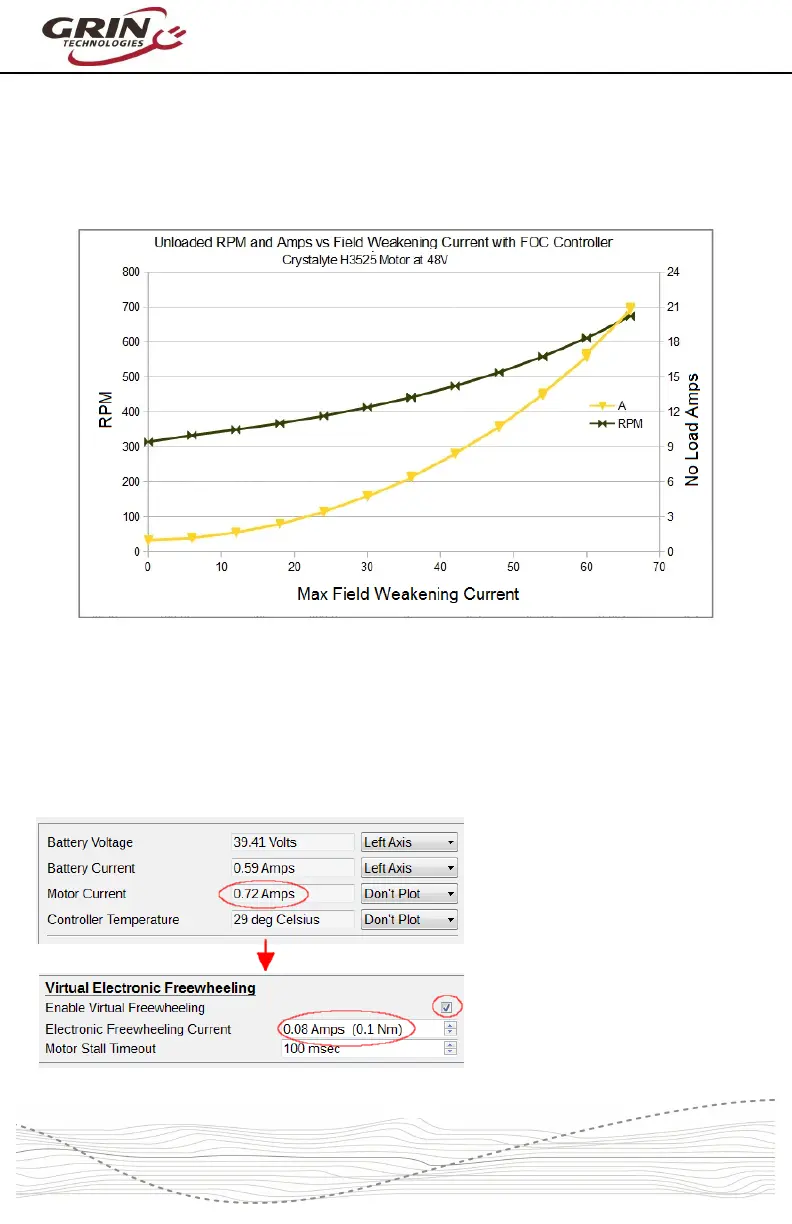
The following graph shows a large direct drive hub motor’s rpm as a function of
field weakening current. The upper black line is the motor’s measured rpm, while
the initially lower yellow line is the no-load current draw, reflecting the amount of
extra power lost due to field weakening. We can see that at 20 amps of field
weakening, the motor speed increases from 310 rpm to 380 rpm, while the no
load current draw is still just under 3 amps.
5.8 Virtual Electronics Freewheeling
Dashboard/Basic Setup tabs
The Baserunner controller can be set to inject a small amount of current into the
motor, even when the throttle is off. When properly tuned, this current injection
can overcome the drag torque present in hub motors capable of regenerative
braking, allowing them to spin freely when pedaling without any throttle.
To setup this feature, we
recommend first going to the
“Dashboard” tab. With the
system throttle at full, note the
“Motor Current” value.
Navigate back to the “Basic
Setup” tab, check “Enable
Virtual Freewheeling,” and set
“Electronic Freewheeling
Current” to a value slightly less
than that of the observed
-19-