Chapter 8 List of Data Settings
8 - 4
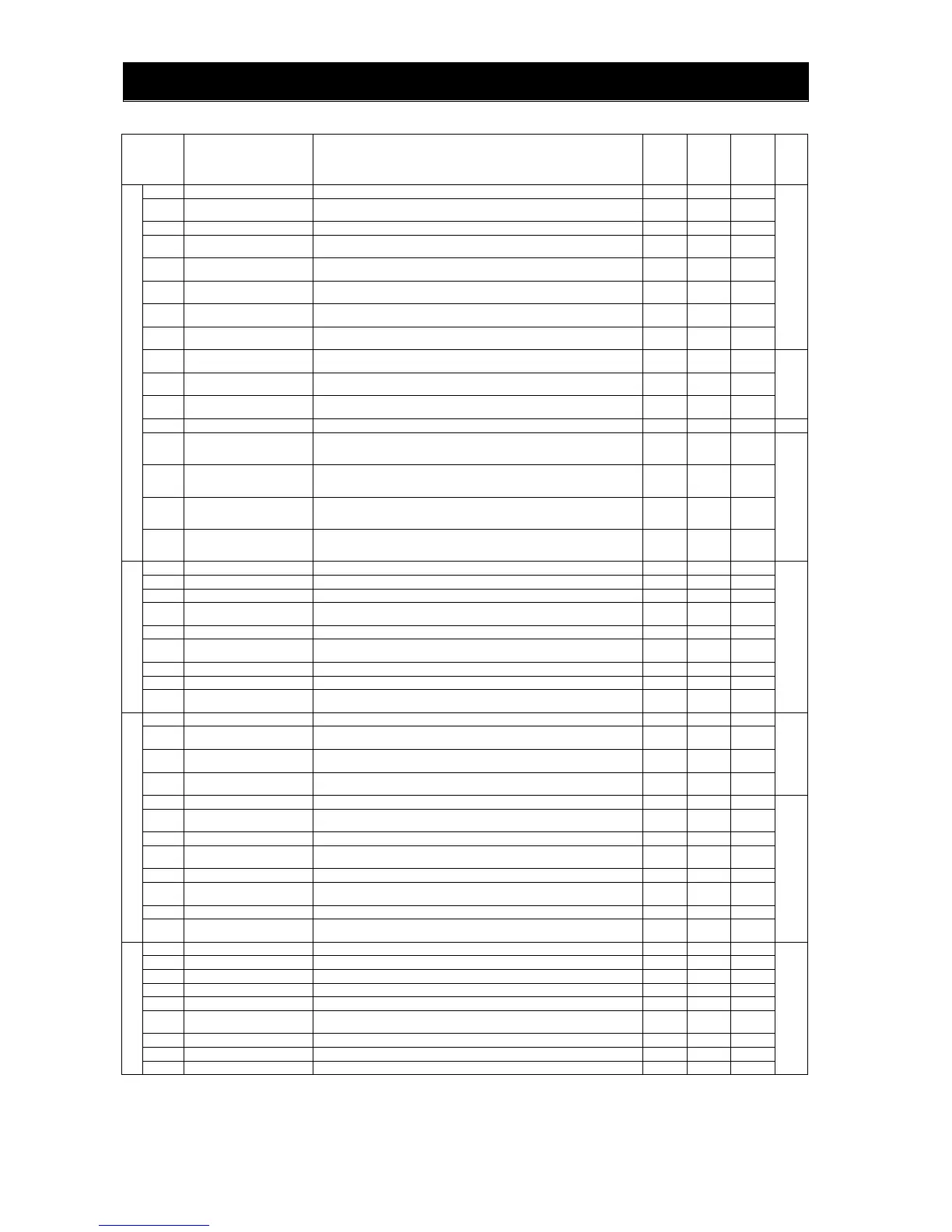
Code Function name Monitored data or setting Default
Setting
during
operation
(allowed or
not)
Change
during
operation
(allowed or
not)
Page
A041 Torque boost method selection 00 (manual torque boost), 01 (automatic torque boost) 00
¯ ¯
A241
Torque boost method selection,
2nd motor
00 (manual torque boost), 01 (automatic torque boost) 00
¯ ¯
A042 Manual torque boost value 0.0 to 20.0 (%) 1.0
{ {
A242
Manual torque boost value, 2nd
motor
0.0 to 20.0 (%) 1.0
{ {
A342
Manual torque boost value, 3rd
motor
0.0 to 20.0 (%) 1.0
{ {
A043
Manual torque boost frequency
adjustment
0.0 to 50.0 (%) 5.0
{ {
A243
Manual torque boost frequency
adjustment, 2nd motor
0.0 to 50.0 (%) 5.0
{ {
A343
Manual torque boost frequency
adjustment, 3rd motor
0.0 to 50.0 (%) 5.0
{ {
4-18
A044
V/F characteristic curve selection,
1st motor
00 (VC), 01 (VP), 02 (free V/f), 03 (sensorless vector control), 04 (0Hz-range sensorless
vector), 05 (vector with sensor)
00
¯ ¯
A244
V/F characteristic curve selection,
2nd motor
00 (VC), 01 (VP), 02 (free V/f), 03 (sensorless vector control), 04 (0Hz-range sensorless
vector)
00
¯ ¯
A344
V/F characteristic curve selection,
3rd motor
00(VC), 01(VP) 00
¯ ¯
4-16
A045 V/f gain setting 20. to 100. (%) 100.
{ {
4-15
A046
Voltage compensation gain setting
for automatic torque boost. 1st
motor
0. to 255. 100.
{ {
A246
Voltage compensation gain setting
for automatic torque boost, 2nd
motor
0. to 255. 100.
{ {
A047
Slippage compensation gain
setting for automatic torque boost,
1st motor
0. to 255. 100.
{ {
V/f characteristic
A247
Slippage compensation gain
setting for automatic torque boost,
2nd motor
0. to 255. 100.
{ {
4-18
A051 DC braking enable 00 (disabling), 01 (enabling), 02 (set frequency only) 00
¯ {
A052 DC braking frequency setting 0.00 to 99.99, 100.0 to 400.0 (Hz) 0.50
¯ {
A053 DC braking wait time 0.0 to 5.0 (s) 0.0
¯ {
A054
DC braking force during
deceleration
0. to 70. (%) 0.
¯ {
A055 DC braking time for deceleration 0.0 to 60.0 (s) 0.0
¯ {
A056
DC braking/edge or level detection
for [DB] input
00 (edge operation), 01 (level operation) 01
¯ {
A057 DC braking force for starting 0. to 70.(%) 0.
¯ {
A058 DC braking time for starting 0.0 to 60.0(s) 0.0
¯ {
DC braking
A059
DC braking carrier frequency
setting
0.5 to 12.0(kHz) 3.0
¯ ¯
4-20
A061 Frequency upper limit setting 0.00 or "1st minimum frequency limit" to "maximum frequency" (Hz) 0.00
¯ {
A261
Frequency upper limit setting, 2nd
motor
0.00 or "2nd minimum frequency limit" to "maximum frequency, 2nd motor" (Hz) 0.00
¯ {
A062 Frequency lower limit setting
0.00 or "start frequency" to "maximum frequency limit"
(Hz)
0.00
¯ {
A262
Frequency lower limit setting, 2nd
motor
0.00 or "start frequency" to "maximum frequency, 2nd motor limit"
(Hz)
0.00
¯ {
4-24
A063 Jump (center) frequency setting 1 0.00 to 99.99, 100.0 to 400.0 (Hz) 0.00
¯ {
A064
Jump (hysteresis) frequency width
setting 1
0.00 to 10.00 (Hz) 0.50
¯ {
A065 Jump (center) frequency setting 2 0.00 to 99.99, 100.0 to 400.0 (Hz) 0.00
¯ {
A066
Jump (hysteresis) frequency width
setting 2
0.00 to 10.00 (Hz) 0.50
¯ {
A067 Jump (center) frequency setting 3 0.00 to 99.99, 100.0 to 400.0 (Hz) 0.00
¯ {
A068
Jump (hysteresis) frequency width
setting 3
0.00 to 10.00 (Hz) 0.50
¯ {
A069 Acceleration stop frequency setting 0.00 to 99.99, 100.0 to 400.0 (Hz) 0.00
¯ {
Frequency upper/lower limit and jump frequency
A070
Acceleration stop time frequency
setting
0.0 to 60.0 (s) 0.0
¯ {
4-25
A071 PID Function Enable 00 (disabling), 01 (enabling), 02 (enabling inverted-data output) 00
¯ {
A072 PID proportional gain 0.2 to 5.0 1.0
{ {
A073 PID integral time constant 0.0 to 999.9, 1000. to 3600. (s) 1.0
{ {
A074 PID derivative gain 0.00 to 99.99, 100.0 (s) 0.00
{ {
A075 PV scale conversion 0.01 to 99.99 1.00
¯ {
A076 PV source setting
00 (input via OI), 01 (input via O), 02 (external communication), 03 (pulse-string frequency
input), 10 (operation result output)
00
¯ {
A077 Output of inverted PID deviation 00(OFF), 01 (ON) 00
¯ {
A078 PID variation range 0.0 to 100.0 (%) 0.00
¯ {
PID control
A079 PID feed forward selection 00 (disabled), 01 (O input), 02 (OI input), 03 (O2 input) 00
¯ {
4-26

 Loading...
Loading...







