E1 Series Servo Drive EtherCAT(CoE) Communications Command Manual Object Dictionary
HIWIN MIKROSYSTEM Corp. 3-15
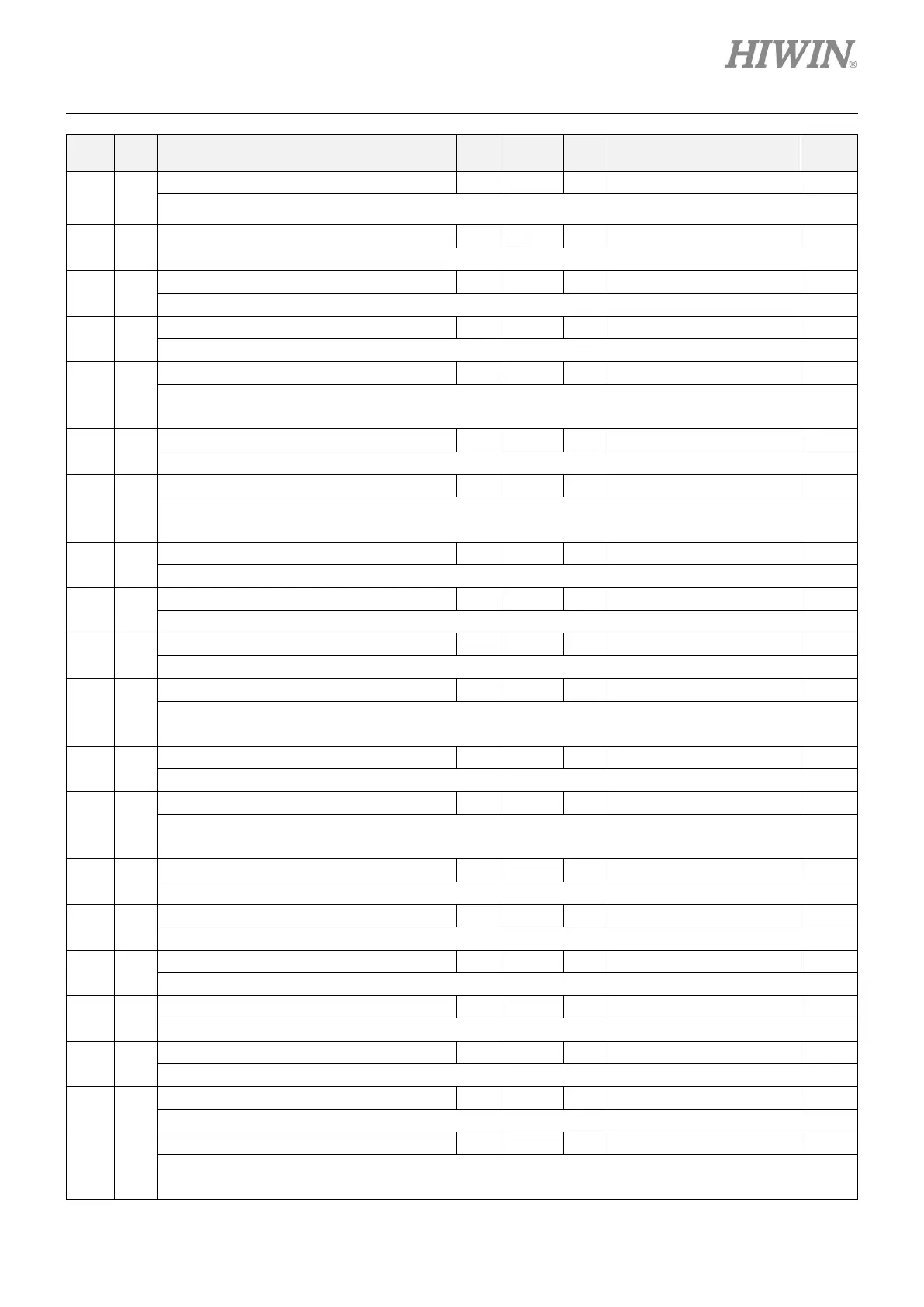
Index
Sub-
Index
Name
Data
type
Access PDO Valid value Unit
6061h 00h
Modes of operation display I8 ro Y 0 ~ 10 -
The actual operation mode in the drive. The object will change to the commanded mode after internal mode is successfully
changed. If the commanded mode is not supported, the object will remain unchanged.
6062h 00h
Position demand value I32 ro Y -2147483648 ~ 2147483647 inc
The required position value.
6063h 00h
Position actual internal value I32 ro Y -2147483648 ~ 2147483647 count
The actual value of motor position. In dual-loop control, the value is from external scale unit.
6064h 00h
Position actual value I32 ro Y -2147483648 ~ 2147483647 inc
The actual value of motor position.
6065h 00h
Following error window U32 rw Y 0 ~ 4294967295 inc
The threshold of 60F4h (following error actual value). When 60F4h (following error actual value) exceeds 6065h, bit 13 of
6041h (statusword) will be 1.
If the object is set to 0, a following error will always occur.
6066h 00h
Following error time out U16 rw Y 0 ~ 65535 ms
Refer to description of 6065h (following error window).
6067h 00h
Position window U32 rw Y 0 ~ 4294967295 inc
If the difference between 6062h (position demand value) and 6064h (position actual value ) is within 6067h (position window)
for longer than the time set by 6068h (position window time), bit 10 of 6041h will be set to 1.
Once the position deviation exceeds 6067h, bit 10 of 6041h (statusword) will be set to 0.
6068h 00h
Position window time U16 rw Y 0 ~ 65535 ms
Refer to description of 6067h (position window).
606Bh 00h
Velocity demand value I32 ro Y -2147483648 ~ 2147483647 inc/s
Internal command velocity
606Ch 00h
Velocity actual value I32 ro Y -2147483648 ~ 2147483647 inc/s
The actual velocity of the motor.
606Dh 00h
Velocity window U16 rw Y 0 ~ 65535 inc/s
If the difference between 60FFh (target velocity) + 60B1h (velocity offset) and 606Ch (velocity actual value) is within 606Dh
(velocity window) for longer than the time set by 606Eh (velocity window time), bit 10 of 6041h (statusword) will be set to 1.
Once the velocity deviation exceeds 6067h (position window), bit 10 of 6041h (statusword) will be set to 0.
606Eh 00h
Velocity window time U16 rw Y 0 ~ 65535 ms
Refer to description of 606Dh (velocity window).
6071h 00h
Target torque I16 rw Y -3000 ~ 3000 0.1%
Torque command. The value is limited by 6072h (max torque).
Output target torque (force) of the drive
= motor torque (force) constant x motor rated current x object 6071h (target torque) / 1000
6072h 00h
Max torque U16 rw Y 0 ~ 3000 0.1%
The configured maximum torque. The value is limited by the motor’s ability.
6074h 00h
Torque demand I16 ro Y -32768 ~ 32767 0.1%
Internal torque command.
6075h 00h
Motor rated current U32 ro - 0 ~ 4294967295 mA
The rated current of the motor.
6076h 00h
Motor rated torque U32 ro - 0 ~ 4294967295 mNm
The rated torque of the motor.
6077h 00h
Torque actual value I16 ro Y -3000 ~ 3000 0.1%
The actual torque of the motor. The value is only for referenece.
607Ah 00h
Target position I32 rw Y -2147483648 ~ 2147483647 inc
Position command.
607Ch 00h
Home offset I32 rw Y -2147483648 ~ 2147483647 inc
After homing procedure is done, the detected index position is set to the value of 607Ch (home offset).
Zero position = home position + home offset
 Loading...
Loading...



