E1 Series Servo Drive EtherCAT(CoE) Communications Command Manual Object Dictionary
3-22 HIWIN MIKROSYSTEM Corp.
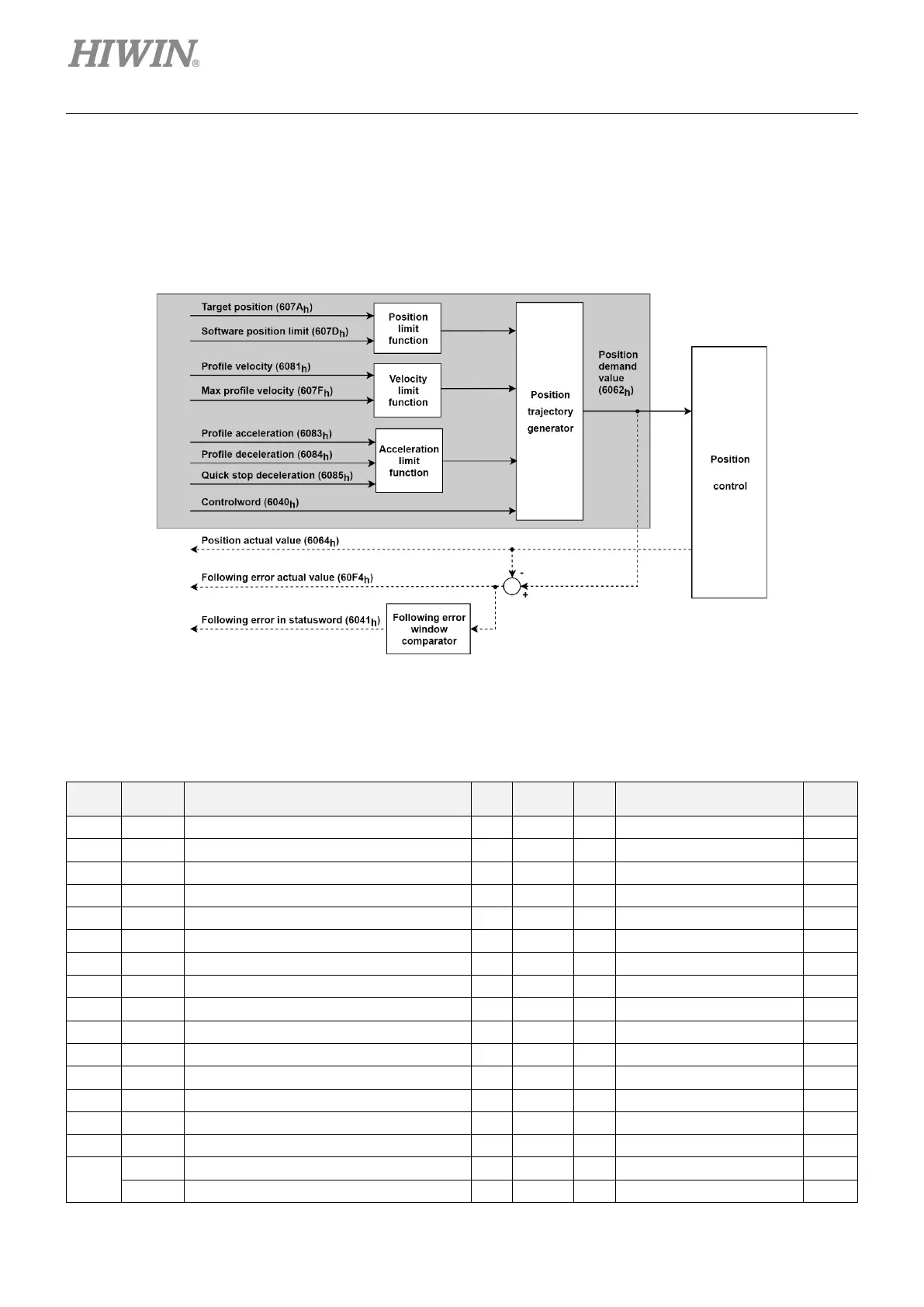
3.2.2 Profile position mode (pp)
Profile position mode is for moving to the target position at the profile velocity and the profile acceleration.
The structure of the trajectory generation is shown in Figure 3.2.2.1.
Figure 3.2.2.1
Related objects for pp mode are listed in Table 3.2.2.1.
Table 3.2.2.1
Index
Index
Name
type
Access PDO Valid value Unit
6040h 00h Controlword U16 rw Y 0x0 ~ 0xFFFF -
6041h 00h Statusword U16 ro Y 0x0 ~ 0xFFFF -
6062h 00h Position demand value I32 ro Y -2147483648 ~ 2147483647 inc
6063h 00h Position actual internal value I32 ro Y -2147483648 ~ 2147483647 count
6064h 00h Position actual value I32 ro Y -2147483648 ~ 2147483647 inc
6065h 00h Following error window U32 rw Y 0 ~ 4294967295 inc
6066h 00h Following error time out U16 rw Y 0 ~ 65535 ms
6067h 00h Position window U32 rw Y 0 ~ 4294967295 inc
6068h 00h Position window time U16 rw Y 0 ~ 65535 ms
606Ch 00h Velocity actual value I32 ro Y -2147483648 ~ 2147483647 inc/s
6072h 00h Max torque U16 rw Y 0 ~ 65535 0.1%
6074h 00h Torque demand I16 ro Y -32768 ~ 32767 0.1%
6076h 00h Motor rated torque U32 ro - 0 ~ 4294967295 mNm
6077h 00h Torque actual value I16 ro Y -32768 ~ 32767 0.1%
607Ah 00h Target position I32 rw Y -2147483648 ~ 2147483647 inc
607Dh
- Software position limit - - - - -
00h Number of entries U8 ro - 2 -
 Loading...
Loading...



