E1 Series Servo Drive EtherCAT(CoE) Communications Command Manual Object Dictionary
HIWIN MIKROSYSTEM Corp. 3-37
Controlword (6040h) for pv mode
Table 3.2.5.2
Bit Value Definition
8
(halt)
Execute or continue the motion.
Axis is stopped according to 605Dh (halt option code).
Statusword (6041h) for pv mode
Table 3.2.5.3
Bit Value Definition
10
(target reached)
0
Halt (Bit 8 in controlword) = 0: target velocity not reached
Halt = 1: axis decelerates
1
Halt = 0: target velocity reached
Halt = 1: velocity of axis is 0
12
(speed)
0 Speed is not equal to 0.
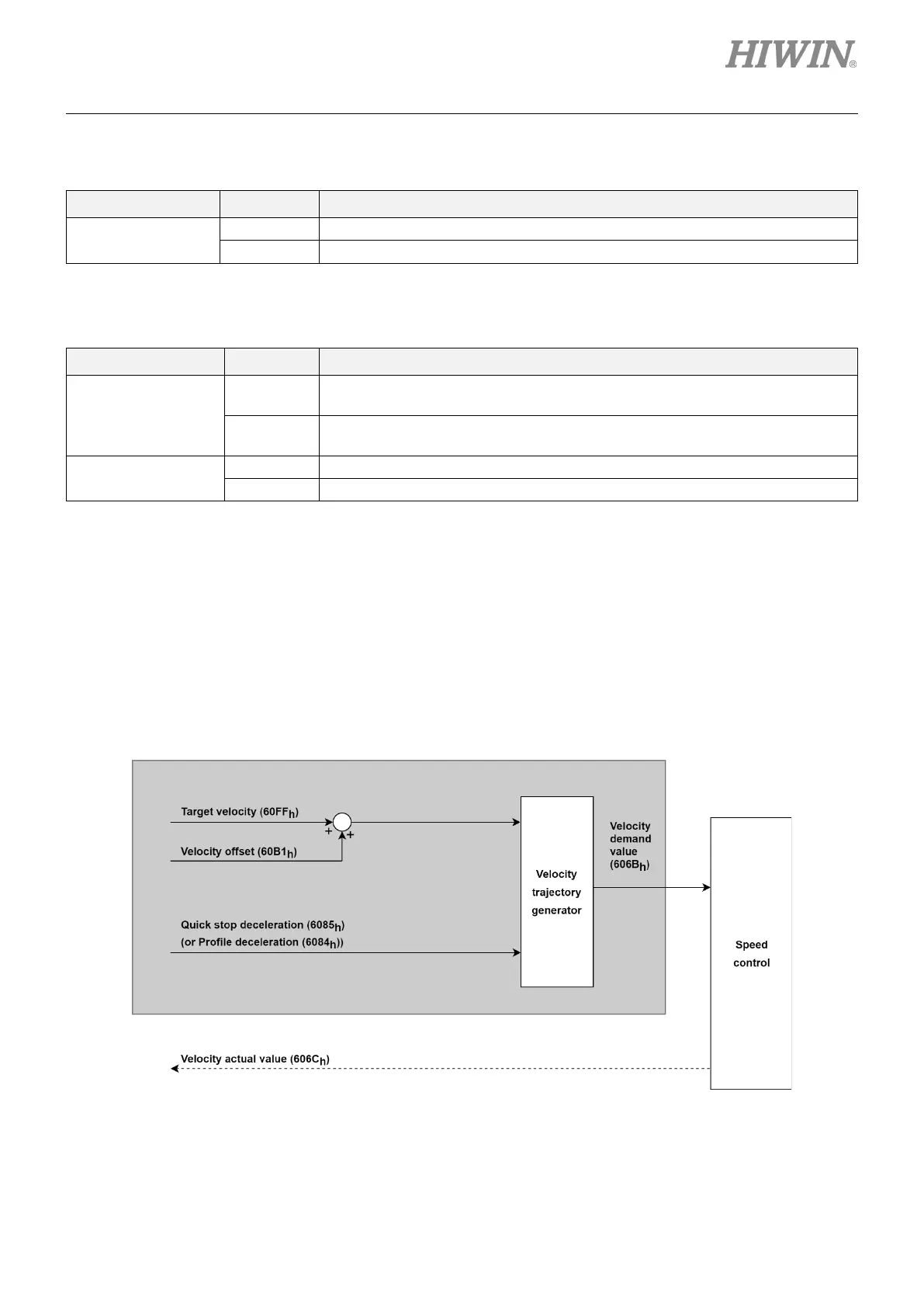
3.2.6 Cyclic synchronous velocity mode (csv)
The motion profile (trajectory) is generated by the master. 60C2h (interpolation time period) indicates the
cycle of updating 60FFh (target velocity). The structure of the trajectory generation is shown in Figure
3.2.6.1.
Figure 3.2.6.1
 Loading...
Loading...



