E1 Series Servo Drive EtherCAT(CoE) Communications Command Manual Object Dictionary
3-28 HIWIN MIKROSYSTEM Corp.
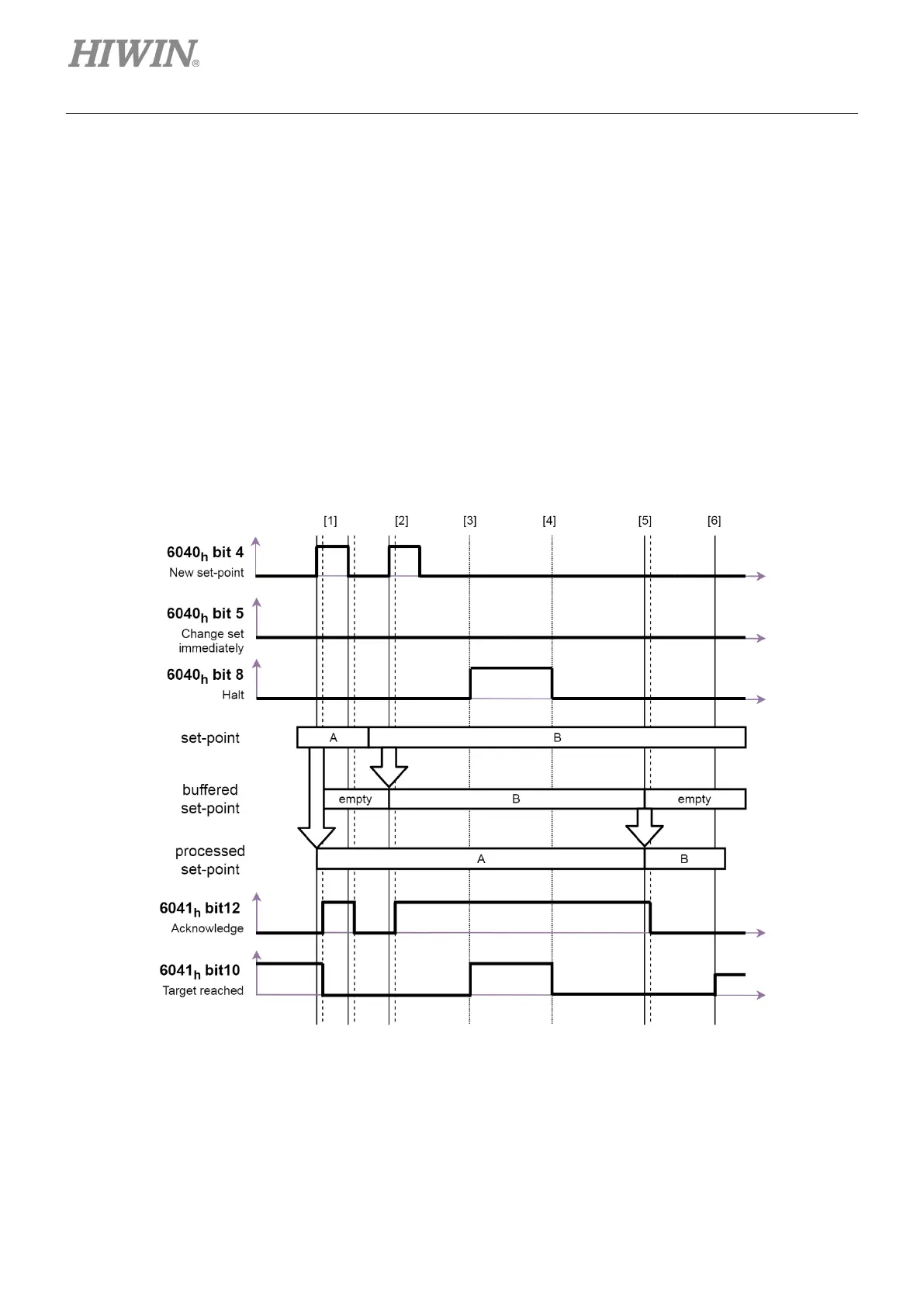
Example of halt bit
When bit 8 of 6040h (controlword) is set to 1 in pp mode, the motion will be temporarily stopped. After bit
8 of 6040h (controlword) returns to 0, unfinished set-points will be resumed.
[1] When there is no set-point in process, the new set-point A is taken immediately.
[2] When set-point A is still in process, the new set-point B is stored if the buffer is empty.
[3] When set-point A is still in process but bit 8 of 6040h (controlword) is set to 1, the motion is halted.
After the motor speed decelerates to 0, bit 10 of 6041h (statusword) changes to 1.
[4] When bit 8 of 6040h (controlword) returns to 0, the motion towards set-point A is resumed. Bit 10 of
6041h (statusword) changes to 0.
[5] After set-point A is reached, set-point B is processed.
[6] Bit 10 of 6041h (statusword) remains 0 until all set-points are processed.
Figure 3.2.2.6
 Loading...
Loading...



